The step-12 tutorial program
Introduction
Finite difference and multigrid methods for the Poisson-Boltzmann equation for accelerating Monte-Carlo simulations of simple models for protein folding. The intramolecular dynamics is simulated using the HP lattice model. The Poisson-Boltzmann equation models the energy constribution due to screening effects due to exterior counter ions.
Physical Model
We describe a protein as a bunch of point charges in some kind of insulator (fat).
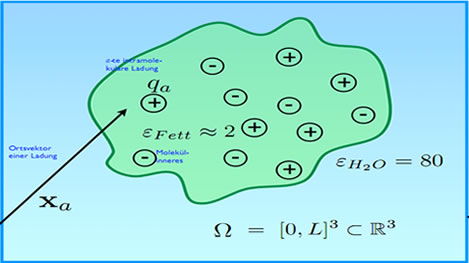
Sketch of model
Mathematical model is the well known Poisson's equation

The potential is denoted as  , permittivity by
, permittivity by  and the intramolecular charge distribution is given by
and the intramolecular charge distribution is given by

where  is a-th intramolecular charge and
is a-th intramolecular charge and  is position of the charge.
is position of the charge.
Discretization of the Physical Model
Discretizing domain with a regular grid
 - points per coordinate axis
- points per coordinate axis
 - width of a cell
- width of a cell
 - discretized coordinates within a domain
- discretized coordinates within a domain
.
Approximation of the right-hand side of the equation
To discretize the  -function we use
-function we use
Given y is in the cell
![\begin{eqnarray}\delta (x-y)=\begin{cases} & \text{ } \frac{1}{h^3}\: \: \: \: \: y\in [ih, ih+h]\times [jh,jh+h]\times[kh,kh+h]\\ & \text{ } 0 \:\: \: \: \: \: \: else \end{cases}\end{eqnarray}](form_115.png)
=> discretized charge distribution

Discretizing Laplacian
Let's denote the discrete potential as 
Approximations of the Laplacian, obtained by the finite difference methode are:





Resulting discretized Poisson's equation

Extended Physical Model
The extended model adds nonlinear term to the origin Poisson's equation
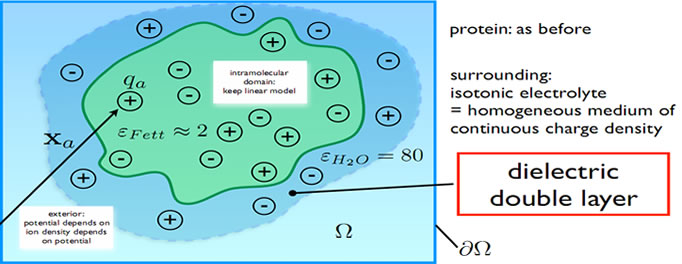
Sketch of model
Resulting equation follows from Debye-Hückel theory

Solving Methods
Relaxation
Relaxation Methods are used to perform smoothing operations by Multgrid Methods. After dicretization we can represent our model as the equation  .
.
Relaxation methods make immediate use of the structure of the sparse matrix 
The Matrix is split into two parts

where  is easily invertible an
is easily invertible an  is the remainder.
is the remainder.
then  becomes
becomes

Jacobi and Gauss-Seidel
Consider splitting Matrix  as
as

For the Jacobi method the easily inertible part is given by

and the remainder is

Gauß-Seidel Method we have


Multigrid Methods
Practical multigrid methods can solve elliptic PDEs discretized on N grid points in O(N) operations. The multigrid methods can solve general elliptic equations with nonconstant coefficients with hardly any loss in efficiency. Even nonlinear equations can be solved with comparable speed.
Suppose we are trying to solve linear elliptic Problem (Poisson's equation)

Discretize equation on a uniform grid with mesh size h

Let  denote some approximate solution
denote some approximate solution
and  denote exact solution
denote exact solution
The error is then

The residual is

In the next step we have to approximate the discretized operator

with

and solve using one of a relaxation method described above (Jacobi or Gauß-Seidel)

Then we get a new improved approximate solution

Full Algorithm
1. Pre-Smoothing (S)

with approximate solution

improved initial solution:

2. Coarse grid correction(C)

restrict defect to coarse grid

correction on coarse grid

add correction from coarse grid to fine-grid solution
3. Post-Smoothing (P)
where

is the restriction operator and

is the prolongation operator.
Multigrid Cycles
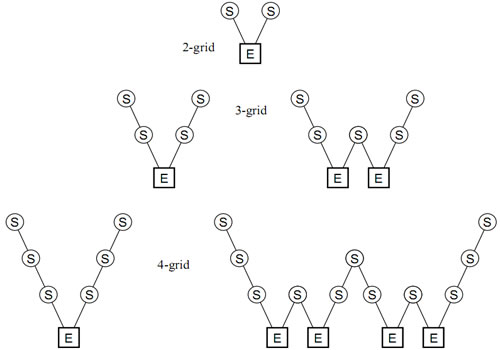
Full Multigrid Cycles
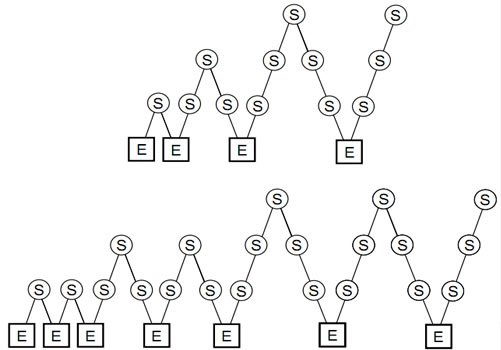
In figures above:
 - denotes excact solution
- denotes excact solution
 - denotes smoothing operation
- denotes smoothing operation
The main difference between Multigrid Cycles and Full Multigrid Cycles is the start of the algorithm. By Full Multigrid Cycle we start on the coarsest grid solving the equation excactly.
Multigrid for Nonlinear Problems (Brand's Full Approximation Storage (FAS))
Multigrid can be applied directly to nonlinear problems.
To do this we need a non linear relaxation procedure to smooth errors for approximating corrections on coarser grids.
Let's denote a nonlinear elliptic as

and in a discetized form on a regular grid with mesh size h as

Suppose we have a nonlinear smoother and the initial solution is already sufficiently smooth
We seek a smooth correction

to solve

To find it note that

after smoothing steps the defect equation is put onto the coarse grid

The coarse grid correction is given by the difference of coarse and fine grid solution. (Not by solving an equation)

Termination Criterion for Nonlinear MG
The local truncation error is defined as

where  is the exact solution of the original equation
is the exact solution of the original equation
if we rewrite the equation as follows

we can see that  can be regarded as the correction of
can be regarded as the correction of  so that the solution of the fine-grid equation will be the exact solution
so that the solution of the fine-grid equation will be the exact solution
Since the computation of the truncation error is problematic we consider the relative local truncation error
The relative local truncation error can be seen as the correction to  that makes the solution of the coarse-grid equation equal to fine-grid solution
that makes the solution of the coarse-grid equation equal to fine-grid solution

Exact relative local truncation errors can not be computed because there are no exact solutions for discretized problems.
A sufficiently accurate estimate of the approximate relative local truncation error can be obtained from using the available approximate solutions


what is just the coarse-grid equation.
Defining Termination Criterion
stop if:

The tolerance should not be smaller than the truncation error
Consider the following Taylor-expansions





The iteration stops when residual and truncation error are of the equal order of magnitude

Nonlinear Relaxation Scheme
Using nonlinear Gauss_Seidel requires that nonlinearities are discretized by function values at neighboring points like for derivatives

Do one Newton step

For example apply the scheme to the Poisson-Boltzman problem in case that only one species of ions is present
(i.e. only constant ions)

Discretized:


Thus, the update ruile is given by

Adaption of PB_Model to CUDA
Put molecule data into constant memory
- intramolecular charges: values, radii, positions
- monomers: centers, radii
- counterions: list of valences; determines electorlyte mixture
permittivity function = superposition of Gaussians (sum over monomers omitted)

permittivity & intramolecular charge distribution as device_functions
intramolecular charge density = sum of sharply peaked Gaussians
Implementation Issues
- Using MG_Frameworks from deal.II
- Restriction and prolongation are equivalent to simple image filters.The only difference is we need them in 3D
- Consider Red-black Ordering of Nodes: Examine Cuda memory access strategies
- Smoothing = Matrix-Vector product (deal.II)
- decouple CUDA-MG from specific PDE
-
try texture filtering for R & P
Literature
- Press: Numerical Recipes in C, Second Edition
- Lecture slides - Finite Differences & Multigrid
The commented program
#ifndef CUDA_KERNEL_STEP_12_CU_H #define CUDA_KERNEL_STEP_12_CU_H #define TILE_SIZE 6 #define MESH_DIM 3
Our goal is to allocate a solution vector as large as possible in CPU memory. MG methods require roughly twice as much memory as is needed for storing the unknows from the finest grid. Thus, in order to determine the number of grid points at the coarsest mesh we have to start from the number of double values fitting into half of the GPU memory, take its cubic root in order to determine the dimensions of the finest grid  Then, we repeatedly divide this number by
Then, we repeatedly divide this number by  until a factor
until a factor  remains, such that
remains, such that  and
and  where
where  is the number of divisionswe made, that is
is the number of divisionswe made, that is  is the number of levels in our grid hierarchy
is the number of levels in our grid hierarchy
A further constraint is given by the fact, that we want the coarse grid solution to fit completely into the shared memory of a single multiprocessor. As coarse grid solver we take a conjugate gradient method which requires an additional auxiliary array in shared memory which is of the same size as the coarse grid solution. Therefore, on the Fermi architecture the number of points per dim of the coarse grid is limited to 14.
As soon as malloc() is available for shared memory the following will be obsolete.
3**3
#if MESH_DIM==3 #define N_POINTS_PHI 27
4**3
#elif MESH_DIM==4 #define N_POINTS_PHI 64
5**3
#elif MESH_DIM==5 #define N_POINTS_PHI 125
6**3
#elif MESH_DIM==6 #define N_POINTS_PHI 216
7**3
#elif MESH_DIM==7 #define N_POINTS_PHI 343
8**3
#elif MESH_DIM==8 #define N_POINTS_PHI 512
9**3
#elif MESH_DIM==9 #define N_POINTS_PHI 729
10**3 //
#elif MESH_DIM==10 #define N_POINTS_PHI 1000
11**3
#elif MESH_DIM==11 #define N_POINTS_PHI 1331
12**3
#elif MESH_DIM==12 #define N_POINTS_PHI 1728
13**3
#elif MESH_DIM==13 #define N_POINTS_PHI 2197
14**3
#elif MESH_DIM==14 #define N_POINTS_PHI 2744 #endif #define N_COARSE_GRID_THREADS 256 static const bool print_sols = false; static const int coarse_cg_max_iter = 100; static const double cg_tol = 1e-12; struct Selectors { enum TransferTestfunction { one, x, y, z, xy, xz, yz, xyz, xx, yy, zz, xxyy, xxyz, yyzz, xyyz, xyzz, xyzzz }; };
Declarations of Kernel Wrapper Functions
void coarse_grid_CG_solve_unit_test(float* phi, int n_coarse_points_per_dim, float tolerance, int max_iter, float* residual); void coarse_grid_CG_solve(float* phi, int n_coarse_points_per_dim, float tolerance, float R, float h, int max_iter, float * residual); void gauss_seidel(float* phi, int n_intervals_per_dim, float R, float h); void grid_transfer(float* phi, float* test, int n_intervals_per_dim, bool prolongation); void MG_reference_solution(float* e_h, float* u_h, int n_intervals_per_dim, float h, float sigma, bool reference_or_error); #ifndef USE_SINGLE_PRECISION void coarse_grid_CG_solve_unit_test(double* phi, int n_coarse_points_per_dim, double tolerance, int max_iter, double* residual); void coarse_grid_CG_solve(double* phi, int n_coarse_points_per_dim, double tolerance, double R, double h, int max_iter, double * residual); void gauss_seidel(double* phi, int n_intervals_per_dim, double R, double h); void gauss_seidel_unit_test(double* phi, int n_intervals_per_dim, double R, double h); void grid_transfer(double* phi, double * test, int n_intervals_per_dim, bool prolongation); void prolongation_unit_test( double * u_H, double * u_h, double* e_H, int n_intervals_per_dim, double h, int current_level, Selectors::TransferTestfunction ftest); void restriction_unit_test( double * u_H, double * u_h, double* e_H, int n_intervals_per_dim, double h, int current_level, Selectors::TransferTestfunction ftest); void MG_reference_solution(double* e_h, double* u_h, int n_intervals_per_dim, double h, double sigma, bool reference_or_error); #endif #endif // CUDA_KERNEL_STEP_12_CU_H
Header-Datei der CUDA utility-Bibliothek.
#include <cutil_inline.h> #include <cuda_kernel_wrapper_step-12.cu.h> #define RED_BLACK_DEBUG #undef RED_BLACK_DEBUG #define RHS_DEBUG #undef RHS_DEBUG
Device Functions and Functors
Class: Constant
template <typename T> class Constant{ public: typedef T NumberType; __device__ Constant(){} __forceinline__ __device__ const T operator ()(const T x, const T y ,const T z) const { return 1; } };
Class: X
template <typename T> class X{ public: typedef T NumberType; __device__ X(){} __forceinline__ __device__ const T operator ()(const T x, const T y ,const T z) const { return x; } };
Class: Y
template <typename T> class Y{ public: typedef T NumberType; __device__ Y(){} __forceinline__ __device__ const T operator ()(const T x, const T y ,const T z) const { return y; } };
Class: Z
template <typename T> class Z{ public: typedef T NumberType; __device__ Z(){} __forceinline__ __device__ const T operator ()(const T x, const T y ,const T z) const { return z; } };
Class: F
template<typename FX, typename FY, typename FZ> class F{ public: typedef typename FX::NumberType NumberType; typedef typename FX::NumberType T; __device__ F() : fx(), fy(), fz() {} __forceinline__ __device__ const T operator() (const T x, const T y, const T z) const { return fx(x,y,z) * fy(x,y,z) * fz(x,y,z); } private: FX fx; FY fy; FZ fz; };
Class: MG_Unit_Test_problem
class for testing the Multigrid solver
template<typename T> class MG_Unit_Test_Curved_Ridges{ public: typedef LaplaceOp<T> DiffOp; MG_Unit_Test_Curved_Ridges(){}
sect5{Class: RHS}
class RHS{ public: RHS(int n_points_per_dim,T h) : _n_points_per_dim(n_points_per_dim), _h(h) {} __forceinline__ __device__ T operator () (const dim3 &grid_pos) const { Stencil stencil(_n_points_per_dim); stencil (grid_pos); int n_intervals_per_dim = _n_points_per_dim-1; bool boundary = (grid_pos.x == 0) || (grid_pos.x == n_intervals_per_dim) || (grid_pos.y == 0) || (grid_pos.y == n_intervals_per_dim) || (grid_pos.z == 0) || (grid_pos.z == n_intervals_per_dim); if (boundary) return ref_sol(grid_pos); else return / *partial with respect to x * / 5 * M_PI *( 10 * M_PI*(grid_pos.x*_h) *(cos(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h)))) *(cos(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h)))) *(exp(2*sin(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h)))) - 8 * grid_pos.z * grid_pos.z ) +(exp(2*sin(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h)))) - 8 * grid_pos.z * grid_pos.z ) *(cos(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h)))) + 5 *M_PI*(grid_pos.*_h + 1) * (sin(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h)))) ) / *partial with respect to y * / + 10 * M_PI*(grid_pos.*_h + 1) *((10*M_PI*grid_pos.y*_h * grid_pos.y * _h) *(cos(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h)))) *(cos(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h))))) *(exp(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h)))) - 4 * grid_pos.z * grid_pos.z +(exp(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h)))) - 4 * grid_pos.z * grid_pos.z *(cos(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h)))) -(5*M_PI*grid_pos.y*_h * 2*grid_pos.y * _h) *(sin(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h)))) / *Partial wit respect to z* / + 8 * (grid_pos.x*_h + 1) *(8*(grid_pos.z*grid_pos.z) - 1) *(exp(sin(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h) )) - 4 * grid_pos.z*_h *grid_pos.z *_h )); } __forceinline__ __device__ T ref_sol(dim3 grid_pos) const { return (1 + grid_pos.x*_h)* exp(-4.0 * (grid_pos.z*_h * grid_pos.z*_h) + sin(5*M_PI*(grid_pos.x*_h + grid_pos.y*_h * grid_pos.y*_h))); } private: int _n_points_per_dim; T _h; }; }; template<typename T> class MG_Unit_Test_Gauss{ public: typedef LaplaceOp<T> DiffOp; MG_Unit_Test_Gauss(){}
sect5{Class: RHS}
class RHS{ public: RHS(int n_points_per_dim,T h, T sigma) : _n_points_per_dim(n_points_per_dim), _h(h), _sigma2(sigma*sigma) {} __forceinline__ __device__ T operator () (const dim3 &grid_pos) const { Stencil stencil(_n_points_per_dim); stencil (grid_pos); int n_intervals_per_dim = _n_points_per_dim-1; bool boundary = (grid_pos.x == 0) || (grid_pos.x == n_intervals_per_dim) || (grid_pos.y == 0) || (grid_pos.y == n_intervals_per_dim) || (grid_pos.z == 0) || (grid_pos.z == n_intervals_per_dim); if (boundary) { return ref_sol(grid_pos); } else { T x2 = grid_pos.x*_h * grid_pos.x*_h; T y2 = grid_pos.y*_h * grid_pos.y*_h; T z2 = grid_pos.z*_h * grid_pos.z*_h;
T s1 = 1/_sigma2; T s2 = 2/_sigma2; T s4 = s2 * s2;
T f = exp(-16 *(x2 + y2 + z2));
return (-32 + 1024*x2) * f
+(-32 + 1024*y2) * f
+(-32 + 1024*z2) * f;
}
}
__forceinline__ __device__
T
ref_sol(const dim3 grid_pos) const
{
return exp(-16 *((grid_pos.x*_h * grid_pos.x*_h )
+ (grid_pos.y*_h * grid_pos.y*_h )
+ (grid_pos.z*_h * grid_pos.z*_h )
));
}
private:
int _n_points_per_dim;
T _h;
T _sigma2;
};
};
Function: red_black_ordering
used to find out whether an element belongs to red or black subset.
__device__ int __red_black_ordering(int i, int j, int k){ if( (i%2 == 0 && j%2==0 && k%2==0) || (i%2 == 1 && j%2==1 && k%2==0) || (i%2 == 0 && j%2==1 && k%2==1) || (i%2 == 1 && j%2==0 && k%2==1)) return 0; return 1; }
Function: is_bound
__device__ bool _is_bound (dim3 grid_pos, int dim){ if(grid_pos.x == 0 || grid_pos.x == dim-1 || grid_pos.y == 0 || grid_pos.y == dim-1 || grid_pos.z == 0 || grid_pos.z == dim-1) { return true; } return false; }
Function: sweep_test
The function tests the sweep functionality
template<typename T, typename DiffOp, typename RHS> __forceinline__ __device__ void __sweep_test(T* phi, int i, int j, int n_intervals_per_dim, bool d, bool boundary_cond, DiffOp &laplace, const RHS &f){ int color; int index; int dim_1 = n_intervals_per_dim + 1; if(d){ index = 0; }else{ index = 1; } dim3 grid_pos(i,j,0); Stencil stencil(dim_1); for(int k=1; k<dim_1-1; k++){ grid_pos.z = k; color = __red_black_ordering(i,j,k); if(color == index) { if(!boundary_cond){ stencil(grid_pos); phi[stencil.site] = stencil.site; } } __syncthreads(); } }
Function: sweep
The function updates the values of the reference solutions
in red-black order. The function called by guass_seidel kernel.
template<typename T, typename DiffOp, typename RHS> __forceinline__ __device__ void __sweep(T* phi, int i, int j, int n_intervals_per_dim, bool d, bool boundary_cond, DiffOp &laplace, const RHS &f){ int color; int index; int dim_1 = n_intervals_per_dim + 1; if(d){ index = 0; }else{ index = 1; } dim3 grid_pos(i,j,0); Stencil stencil(dim_1); for(int k=1; k<dim_1-1; k++){ grid_pos.z = k; color = __red_black_ordering(i,j,k); if(color == index) { if(!boundary_cond){ stencil(grid_pos); phi[stencil.site] -= (laplace(stencil, phi)-f(grid_pos)) / laplace.grad_u(stencil, phi); } } __syncthreads(); } }
Device Function: __in_range
- Parameters:
-
i : index to check, whether  .
. i_min : lower bound of interval i_sup : upper bound of interval
__device__ bool in_range(int i, int i_min, int i_sup) { return ((i >= i_min) && (i < i_sup)); }
Device Function: boundary_cond
__device__ bool __boundary_cond(int n_intervals_per_dim, int Halo_width, int i, int j){ return !(in_range(i, Halo_width, n_intervals_per_dim + 1 - Halo_width) && in_range(j, Halo_width, n_intervals_per_dim + 1 - Halo_width) ); }
Kernel: __gauss_seidel
The kernel delegates its work to the __sweep() function so that one does not have to implement the same functionality for the red and the black subgrid twice.
template<typename T, typename DiffOp, typename RHS> __global__ void __gauss_seidel(T* phi, int n_intervals_per_dim, DiffOp laplace, const RHS f) { int j = blockIdx.x * blockDim.x + threadIdx.x; int i = blockIdx.y * blockDim.y + threadIdx.y; bool cond; int Halo_width = 1; bool RED = true; bool BLACK = false; if(i > (n_intervals_per_dim) && (j > n_intervals_per_dim) ) return; cond = __boundary_cond(n_intervals_per_dim, Halo_width, i , j); __sweep(phi, i, j, n_intervals_per_dim, RED, cond, laplace, f); __syncthreads(); __sweep(phi, i, j, n_intervals_per_dim, BLACK, cond, laplace, f); __syncthreads(); }
Kernel: __grid_transfer
The function delegates its work to the appropriate transfer operator.
template<typename T, typename TransferOp> __global__ void __grid_transfer(T* phi_H, T* phi_h, int n_intervals_per_dim, TransferOp transfer,bool prolongation) { int i = blockIdx.x * blockDim.x + threadIdx.x; int j = blockIdx.y * blockDim.y + threadIdx.y; int in_dim_1 = n_intervals_per_dim + 1; if (i >= in_dim_1) return; if (j >= in_dim_1) return; dim3 grid_pos(i,j,0); for(int k=0; k<in_dim_1; k++){ grid_pos.z = k; / *printf("%d", site);* / if(prolongation) { transfer.prolongate(grid_pos, in_dim_1, phi_H, phi_h); } else { transfer.restriction(grid_pos, in_dim_1, phi_H, phi_h); } __syncthreads(); } } #include "cuda_coarse_grid_cg.cu.c"
Wrapper Function: _gauss_seidel_unit_test
Used for testing purposes of the guass-seidel solver.
The variable n_threads_per_block_dim corresponds to CUDA compute capability.
On Fermi architecture it is possible to start 32 threads per block dimension.
template<typename T> void _gauss_seidel_unit_test(T* phi, int n_intervals_per_dim, T R, T h) { #if __CUDA_ARCH__ < 200 int n_threads_per_block_dim = 16; #else int n_threads_per_block_dim = 32; #endif int blocks_per_dim = ((n_intervals_per_dim + 1) + n_threads_per_block_dim - 1)/n_threads_per_block_dim; int n_points_per_dim = (n_intervals_per_dim + 1); / *printf(" n block per dim %d \n",blocks_per_dim); * / dim3 grid(blocks_per_dim, blocks_per_dim); dim3 blocks(n_threads_per_block_dim,n_threads_per_block_dim); __gauss_seidel<<<grid,blocks>>>(phi, n_intervals_per_dim, typename MG_Unit_Test_Gauss<T>::DiffOp(), typename MG_Unit_Test_Gauss<T>::RHS(n_intervals_per_dim + 1,h, R) / * typename CGUnitTestProblem<T>::DiffOp(), typename CGUnitTestProblem<T>::RHS(n_points_per_dim)* / ); cudaThreadSynchronize(); }
Wrapper Function: _gauss_seidel
template<typename T> void _gauss_seidel(T* phi, int n_intervals_per_dim, T h, T sigma) { #if __CUDA_ARCH__ < 200 int n_threads_per_block_dim = 16; #else int n_threads_per_block_dim = 32; #endif int blocks_per_dim = ((n_intervals_per_dim + 1) + n_threads_per_block_dim - 1)/n_threads_per_block_dim; / *printf(" n block per dim %d \n",blocks_per_dim);* / dim3 grid(blocks_per_dim, blocks_per_dim); dim3 blocks(n_threads_per_block_dim,n_threads_per_block_dim); __gauss_seidel<<<grid,blocks>>>(phi, n_intervals_per_dim, typename MG_Unit_Test_Gauss<T>::DiffOp(), typename MG_Unit_Test_Gauss<T>::RHS(n_intervals_per_dim + 1, h, sigma)); cudaThreadSynchronize(); }
Wrapper Function: _grid_transfer
template<typename T> void _grid_transfer(T* phi_H, T* phi_h, int n_intervals_per_dim, bool prolongation) { #if __CUDA_ARCH__ < 200 int n_threads_per_block_dim = 16; #else int n_threads_per_block_dim = 32; #endif int blocks_per_dim = ((n_intervals_per_dim+1) + n_threads_per_block_dim)/n_threads_per_block_dim; dim3 grid(blocks_per_dim, blocks_per_dim); dim3 blocks(n_threads_per_block_dim, n_threads_per_block_dim); __grid_transfer<<<grid,blocks>>>(phi_H, phi_h, n_intervals_per_dim, InterGridOperator<T>(),prolongation); cudaThreadSynchronize(); }
Template specializations
void gauss_seidel(float* phi, int n_intervals_per_dim, float h, float sigma) { _gauss_seidel(phi, n_intervals_per_dim, h, sigma); } void gauss_seidel_unit_test(float* phi, int n_intervals_per_dim, float R, float h) { _gauss_seidel_unit_test(phi, n_intervals_per_dim, R, h); } void grid_transfer(float* phi_H, float * phi_h, int n_intervals_per_dim, bool prolongation) { _grid_transfer(phi_H, phi_h, n_intervals_per_dim, prolongation); } #ifndef USE_SINGLE_PRECISION void gauss_seidel(double* phi, int n_intervals_per_dim, double h, double sigma) { _gauss_seidel(phi, n_intervals_per_dim, h, sigma); } void gauss_seidel_unit_test(double* phi, int n_intervals_per_dim, double R, double h) { _gauss_seidel_unit_test(phi, n_intervals_per_dim, R, h); } void grid_transfer(double* phi_H, double * phi_h, int n_intervals_per_dim, bool prolongation) { _grid_transfer(phi_H, phi_h, n_intervals_per_dim, prolongation); } #endif
Kernel Function: prolongation_unit_test
The function tests the prolongation operator. The output of the transfer is compared with the reference solution computed analytically.
template <typename T, typename F> __global__ void __prolongation_unit_test( T * u_H, T * u_h, T* e_H, int n_intervals_per_dim, T h, int current_level) { int i = blockIdx.x * blockDim.x + threadIdx.x; int j = blockIdx.y * blockDim.y + threadIdx.y; int in_dim_1 = n_intervals_per_dim + 1; T tmp, tmp_e; dim3 grid_pos_h(i,j,0); dim3 grid_pos_H(i/2, j/2,0); T H = 2*h; if (i >= in_dim_1) return; if (j >= in_dim_1) return; Stencil s_h(in_dim_1); Stencil s_H(n_intervals_per_dim/2 + 1); const F f; InterGridOperator<T> transfer; for(int k=0; k<in_dim_1; k+=2){ if( (grid_pos_h.x%2 == 0) && (grid_pos_h.y%2 == 0) ) { grid_pos_H.z = k/2; s_H(grid_pos_H); tmp = f(H*grid_pos_H.x, H*grid_pos_H.y, H*grid_pos_H.z); if (current_level == 0) u_H[s_H.site] = tmp; tmp_e = u_H[s_H.site] - tmp; / *e_H[s_H.site] = u_H[s_H.site];* / e_H[s_H.site] = tmp_e * tmp_e; / * u_H[s_H.site] = tmp;* / } } __syncthreads(); for(int k=0; k<in_dim_1; k++){ grid_pos_h.z = k; transfer.prolongate(grid_pos_h, in_dim_1, u_H, u_h); if (is_boundary_point(grid_pos_h, in_dim_1)) { s_h(grid_pos_h); tmp = f(h*grid_pos_h.x, h*grid_pos_h.y, h*grid_pos_h.z); u_h[s_h.site] = tmp; } __syncthreads(); } }
Wrapper Function: _prolongation_unit_test
The wrapper function passes the test function(s) chosen in the parameter file to the kernel.
template<typename T> void _prolongation_unit_test( T * u_H, T * u_h, T* e_H, int n_intervals_per_dim, T h, int current_level, Selectors::TransferTestfunction ftest) { #if __CUDA_ARCH__ < 200 int n_threads_per_block_dim = 16; #else int n_threads_per_block_dim = 16; #endif int blocks_per_dim = ((n_intervals_per_dim) + n_threads_per_block_dim)/n_threads_per_block_dim; dim3 grid(blocks_per_dim, blocks_per_dim); dim3 blocks(n_threads_per_block_dim, n_threads_per_block_dim); typedef Constant<T> one; typedef F< X<T>, Constant<T>, Constant<T> > x; typedef F< Constant<T>, Y<T>, Constant<T> > y; typedef F< Constant<T>, Constant<T>, Z<T> > z; typedef F< x, y, one > xy; typedef F< x, one, z > xz; typedef F< one, y, z > yz; typedef F< x, y, z > xyz; typedef F< x, x, one > xx; typedef F< y, y, one > yy; typedef F< one, z, z > zz; typedef F< z, z, z > zzz; typedef F< xx, yy, one > xxyy; typedef F< xx, yy, z > xxyz; typedef F< one,Y<T>, Y<T> > yyzz; typedef F< x, yy, z> xyyz; typedef F< x,y , zz> xyzz; typedef F< x, y, zzz > xyzzz;
The kernel function testing grid transfer operator runs appropriate unit_test depending on type of function that should be tested.
switch (ftest) { case Selectors::one: __prolongation_unit_test<T,one><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::x: __prolongation_unit_test<T,x><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::y: __prolongation_unit_test<T,y><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::z: __prolongation_unit_test<T,z><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xy: __prolongation_unit_test<T,xy><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xz: __prolongation_unit_test<T,xz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::yz: __prolongation_unit_test<T,yz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xyz: __prolongation_unit_test<T,xyz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xx: __prolongation_unit_test<T,xx><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::yy: __prolongation_unit_test<T,yy><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::zz: __prolongation_unit_test<T,zz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xxyy: __prolongation_unit_test<T,xxyy><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xxyz: __prolongation_unit_test<T,xxyz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::yyzz: __prolongation_unit_test<T,yyzz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xyyz: __prolongation_unit_test<T,xyyz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xyzz: __prolongation_unit_test<T,xyzz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xyzzz: __prolongation_unit_test<T,xyzzz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; default: break; } cudaThreadSynchronize(); }
template specialization
void prolongation_unit_test( double * u_H, double * u_h, double* e_H, int n_intervals_per_dim, double h, int current_level, Selectors::TransferTestfunction ftest) { _prolongation_unit_test(u_H, u_h, e_H, n_intervals_per_dim, h, current_level, ftest); }
Kernel Function: restriction_unit_test
The function tests the restriction operator. The output of the transfer is compared with the reference solution computed analytically.
template <typename T, typename F> __global__ void __restriction_unit_test( T * u_H, T * u_h, T* e_H, int n_intervals_per_dim, T h, int current_level) { int i = blockIdx.x * blockDim.x + threadIdx.x; int j = blockIdx.y * blockDim.y + threadIdx.y; int in_dim_1 = n_intervals_per_dim + 1; T tmp, tmp_e; dim3 grid_pos_h(i,j,0); dim3 grid_pos_H(i/2, j/2,0); T H = 2*h; if (i >= in_dim_1) return; if (j >= in_dim_1) return; Stencil s_h(in_dim_1); Stencil s_H((n_intervals_per_dim/2) + 1); const F f; InterGridOperator<T> transfer; if (current_level == 0){ for(int k=0; k<in_dim_1; k++){ s_h(grid_pos_h); tmp = f(h*grid_pos_h.x, h*grid_pos_h.y, h*grid_pos_h.z); u_h[s_h.site] = tmp; } } for(int k=0; k<in_dim_1; k++){ grid_pos_h.z = k; transfer.restriction(grid_pos_h, in_dim_1, u_H, u_h); if (is_boundary_point(grid_pos_h, in_dim_1)) { s_h(grid_pos_h); tmp = f(h*grid_pos_h.x, h*grid_pos_h.y, h*grid_pos_h.z); u_h[s_h.site] = tmp; } __syncthreads(); } for(int k=0; k<in_dim_1; k+=2){ if( (grid_pos_h.x%2 == 0) && (grid_pos_h.y%2 == 0) ) { grid_pos_H.z = k/2; s_H(grid_pos_H); tmp = f(H*grid_pos_H.x, H*grid_pos_H.y, H*grid_pos_H.z); tmp_e = u_H[s_H.site] - tmp; / *e_H[s_H.site] = u_H[s_H.site];* / e_H[s_H.site] = tmp_e * tmp_e; / * u_H[s_H.site] = tmp;* / } } }
Wrapper Function: _restriction_unit_test
The wrapper function passes the test function(s) chosen in the parameter file to the kernel.
template<typename T> void _restriction_unit_test( T * u_H, T * u_h, T* e_H, int n_intervals_per_dim, T h, int current_level, Selectors::TransferTestfunction ftest) { #if __CUDA_ARCH__ < 200 int n_threads_per_block_dim = 16; #else int n_threads_per_block_dim = 16; #endif int blocks_per_dim = ((n_intervals_per_dim)+n_threads_per_block_dim)/n_threads_per_block_dim; dim3 grid(blocks_per_dim, blocks_per_dim); dim3 blocks(n_threads_per_block_dim, n_threads_per_block_dim); typedef Constant<T> one; typedef F< X<T>, Constant<T>, Constant<T> > x; typedef F< Constant<T>, Y<T>, Constant<T> > y; typedef F< Constant<T>, Constant<T>, Z<T> > z; typedef F< x, y, one > xy; typedef F< x, one, z > xz; typedef F< one, y, z > yz; typedef F< x, y, z > xyz; typedef F< x, x, one > xx; typedef F< y, y, one > yy; typedef F< one, z, z > zz; typedef F< z, z, z > zzz; typedef F< xx, yy, one > xxyy; typedef F< xx, yy, z > xxyz; typedef F< one,Y<T>, Y<T> > yyzz; typedef F< x, yy, z> xyyz; typedef F< x,y , zz> xyzz; typedef F< x, y, zzz > xyzzz;
The kernel function testing grid transfer operator runs appropriate unit_test depending on type of function that should be tested.
switch (ftest) { case Selectors::one: __restriction_unit_test<T,one><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::x: __restriction_unit_test<T,x><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::y: __restriction_unit_test<T,y><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::z: __restriction_unit_test<T,z><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xy: __restriction_unit_test<T,xy><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xz: __restriction_unit_test<T,xz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::yz: __restriction_unit_test<T,yz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xyz: __restriction_unit_test<T,xyz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xx: __restriction_unit_test<T,xx><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::yy: __restriction_unit_test<T,yy><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::zz: __restriction_unit_test<T,zz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xxyy: __restriction_unit_test<T,xxyy><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xxyz: __restriction_unit_test<T,xxyz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::yyzz: __restriction_unit_test<T,yyzz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xyyz: __restriction_unit_test<T,xyyz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xyzz: __restriction_unit_test<T,xyzz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xyzzz: __restriction_unit_test<T,xyzzz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; default: break; } cudaThreadSynchronize(); }
template specialization
void restriction_unit_test( double * u_H, double * u_h, double* e_H, int n_intervals_per_dim, double h, int current_level, Selectors::TransferTestfunction ftest) { _restriction_unit_test(u_H, u_h, e_H, n_intervals_per_dim, h, current_level, ftest); }
Kernel: __MG_reference_solution
The kernel delegates its work to the __sweep_test() function so that one does not have to implement the same functionality for the red and the black subgrid twice.
template<typename T, typename DiffOp, typename RHS> __global__ void __MG_reference_solution(T* e_h, T* u_h, int n_intervals_per_dim, DiffOp laplace, const RHS f, bool reference_or_error) { int j = blockIdx.x * blockDim.x + threadIdx.x; int i = blockIdx.y * blockDim.y + threadIdx.y; if (i > n_intervals_per_dim) return; if (j > n_intervals_per_dim) return; int dim_1 = n_intervals_per_dim + 1; dim3 grid_pos(i,j,0); Stencil stencil(dim_1); for(int k=0; k<dim_1; k++){ grid_pos.z = k; stencil(grid_pos); if( _is_bound (grid_pos, n_intervals_per_dim)) { u_h[stencil.site] = f.ref_sol(grid_pos); } if(reference_or_error) // reference { e_h[stencil.site] = f.ref_sol(grid_pos); } else //or error { e_h[stencil.site] = f.ref_sol(grid_pos); e_h[stencil.site] -= u_h[stencil.site]; } } }
Wrapper Function: _MG_reference_solution
Used for testing purposes of the Multigid solver.
The variable n_threads_per_block_dim corresponds to CUDA compute capability.
On Fermi architecture it is possible to start 32 threads per block dimension.
template<typename T> void _MG_reference_solution(T* e_h, T* u_h, int n_intervals_per_dim, T h, T sigma, bool reference_or_error) { #if __CUDA_ARCH__ < 200 int n_threads_per_block_dim = 16; #else int n_threads_per_block_dim = 32; #endif int blocks_per_dim = ((n_intervals_per_dim + 1) + n_threads_per_block_dim - 1)/n_threads_per_block_dim; / *printf(" n block per dim %d \n",blocks_per_dim);* / dim3 grid(blocks_per_dim, blocks_per_dim); dim3 blocks(n_threads_per_block_dim,n_threads_per_block_dim); __MG_reference_solution<<<grid,blocks>>>(e_h,u_h,n_intervals_per_dim, typename MG_Unit_Test_Gauss<T>::DiffOp(), typename MG_Unit_Test_Gauss<T>::RHS((n_intervals_per_dim + 1), h, sigma), reference_or_error); cudaThreadSynchronize(); } void MG_reference_solution(float* e_h, float* u_h, int n_intervals_per_dim, float h, float sigma, bool reference_or_error) { _MG_reference_solution(e_h, u_h, n_intervals_per_dim, h, sigma, reference_or_error); } #ifndef USE_SINGLE_PRECISION void MG_reference_solution(double* e_h, double* u_h, int n_intervals_per_dim, double h, double sigma, bool reference_or_error) { _MG_reference_solution(e_h, u_h, n_intervals_per_dim, h, sigma, reference_or_error); } #endif #ifndef CUDADriver_STEP_12_H #define CUDADriver_STEP_12_H #include <lac/blas++.h> #include <base/parameter_handler.h> #include <cuda_kernel_wrapper_step-12.cu.h>
Every program uses a separate namespace, in order to be able to combine different Driver classes or more coplex projects in the future.
namespace step12 {
Struct: SimParam
The structure is used to create a parameter file. It allows changing parameter at execution time.
struct SimParam { static void declare(::ParameterHandler & prm); void get(::ParameterHandler & prm); void run(std::string prm_filename); int max_level; bool disp_mem_consumption, disp_phi_max_size, disp_error_matrix, disp_transfer_dimension_resize_info, disp_transfer_error, disp_data_matrix, disp_transfer_time, disp_pointer, disp_current_level; std::string n_cycle; QString test_functions; std::vector<Selectors::TransferTestfunction> tests; std::map<QString, Selectors::TransferTestfunction> prm_name2enum, transfer_tests; SimParam(){ prm_name2enum["one"]=Selectors::one; prm_name2enum["x"]=Selectors::x; prm_name2enum["y"]=Selectors::y; prm_name2enum["z"]=Selectors::z; prm_name2enum["xy"]=Selectors::xy; prm_name2enum["xz"]=Selectors::xz; prm_name2enum["yz"]=Selectors::yz; prm_name2enum["xyz"]=Selectors::xyz; prm_name2enum["xx"]=Selectors::xx; prm_name2enum["yy"]=Selectors::yy; prm_name2enum["zz"]=Selectors::zz; prm_name2enum["xxyy"]=Selectors::xxyy; prm_name2enum["xxyz"]=Selectors::xxyz; prm_name2enum["yyzz"]=Selectors::yyzz; prm_name2enum["xyyz"]=Selectors::xyyz; prm_name2enum["xyzz"]=Selectors::xyzz; prm_name2enum["xyzzz"]=Selectors::xyzzz; } };
Function: declare
void SimParam::declare(::ParameterHandler &prm) { prm.enter_subsection("Choose unit test"); prm.declare_entry("Max level", "1", ::Patterns::Integer(), "Maximum level of multigrid cycles.\n" " # Possible values : 1,2,3..."); prm.declare_entry("Type of cycle", "v", ::Patterns::Anything(), "Type of Cycle(v,w). " "Multigrid cycles types defined in Wesseling" " # Possible values: v,w"); prm.declare_entry("Display memory consumption", "false", ::Patterns::Bool(), "Displaying memory consumption of all solutions" ""); prm.declare_entry("Display finest grid size", "false", ::Patterns::Bool(), "Displaying grid size of the maximum level" "");
mg_unit_test.test_coarse_CG_solver();
mg_unit_test.test_gauss_seidel();
mg_unit_test.test_grid_transfer();
mg_unit_test.test_Multigrid();
prm.leave_subsection();
prm.enter_subsection("Grid transfer tests");
prm.declare_entry("Test functions", "one, x, y, z",
::Patterns::Anything(),
"Functions for testing the multigrid transfer. "
"Transfer is done via multilinear interpolation."
"Test functions comprise the set of functions "
"that can be transferred exactly (all multilinear"
"combinations of one, x,y,z)"
"and several which are quadratic or cubic in one component"
"in order to reproduce"
"interpolation errors."
"Possible values : one, x, y, z, xy, xz, yz, xyz, xx, yy, zz, xxyy, xxyz, "
"yyzz, xyyz, xyzz, xyzzz");
prm.declare_entry("Max level", "1",
::Patterns::Integer(),
"Maximum level of multigrid cycles.\n"
" # Possible values : 1,2,3...");
prm.declare_entry("Type of cycle", "v",
::Patterns::Anything(),
"Type of Cycle(v,w). "
"Multigrid cycles types defined in Wesseling"
" # Possible values: v,w");
prm.declare_entry("Display memory consumption", "false",
::Patterns::Bool(),
"Displaying memory consumption of all solutions"
"");
prm.declare_entry("Display finest grid size", "false",
::Patterns::Bool(),
"Displaying grid size of the maximum level"
"");
prm.declare_entry("Display error matrix", "false",
::Patterns::Bool(),
"Displaying error matrix of one resizing step"
"");
prm.declare_entry("Display dimension information", "false",
::Patterns::Bool(),
"Displaying dimensions of the current reference solution "
"matrix "
"");
prm.declare_entry("Display transfer error", "false",
::Patterns::Bool(),
"Displaying l2 norm of the error vector of one resizing step."
"");
prm.declare_entry("Display reference solution", "false",
::Patterns::Bool(),
"Displaying current reference solution matrix "
"containing actual data "
"");
prm.declare_entry("Display transfer time", "false",
::Patterns::Bool(),
"Displaying transfer time between two levels"
"");
prm.declare_entry("Display pointers", "false",
::Patterns::Bool(),
"Displaying begin of the areas within the whole "
"refernce solution vector"
"");
prm.declare_entry("Display current level", "false",
::Patterns::Bool(),
"Displaying level of a current multigrid cycle, "
"0 at the bottom"
"");
prm.leave_subsection();
prm.enter_subsection("Grid transfer tests");
prm.leave_subsection();
}
Function: get
void SimParam::get(::ParameterHandler &prm) { prm.enter_subsection("Grid transfer tests"); test_functions = QString(prm.get("Test functions").c_str()); max_level = prm.get_integer("Max level"); n_cycle = prm.get("Type of cycle"); disp_mem_consumption = prm.get_bool("Display memory consumption"); disp_phi_max_size = prm.get_bool("Display finest grid size"); disp_error_matrix = prm.get_bool("Display error matrix"); disp_transfer_dimension_resize_info = prm.get_bool("Display dimension information"); disp_transfer_error = prm.get_bool("Display transfer error"); disp_data_matrix = prm.get_bool("Display reference solution"); disp_transfer_time = prm.get_bool("Display transfer time"); disp_pointer = prm.get_bool("Display pointers"); disp_current_level = prm.get_bool("Display current level"); prm.leave_subsection(); QStringList tmp = test_functions.split(",", QString::SkipEmptyParts); QStringList::const_iterator e = tmp.begin(),ende = tmp.end(); for(; e!=ende;++e) { std::map<QString, Selectors::TransferTestfunction> :: const_iterator result = prm_name2enum.find(*e); if( result!= prm_name2enum.end() ) transfer_tests[result->first] = result->second; } if (!tmp.empty() && transfer_tests.empty()) std::cerr << "WARNING : NO VALID TEST FUNCTIONS FOR GRID TRANSFER TESTS SELECTED!!! "<< "CHECK prm file." << std::endl; }
Klasse: CUDAUnitTestDriver
Diese Klasse steuert die host-device-Kommunikation, also Datentransfer und wann welcher Kernel aufgerufen wird. Die Dokumentation der member-Funktionen steht bei und in der Implementierung, d.h. im cu-file.
template<typename T> class CUDAUnitTestDriver { const SimParam * __params; public: typedef typename blas_pp<T,cublas>::Vector Vector; CUDAUnitTestDriver(const SimParam &p) : __params(&p) { Vector::blas_wrapper_type::Init(); cudaThreadSynchronize(); } ~CUDAUnitTestDriver() { Vector::blas_wrapper_type::Shutdown(); }
Functions for unit tests
void test_coarse_CG_solver(); void test_gauss_seidel(); void test_grid_transfer(); void test_grid_transfer_implementation(Selectors::TransferTestfunction test_function); void test_Multigrid();
Class: Potential
This main purpose of this class is to provide some means to copy data back from device to host.
class Potential : public Vector { typedef typename Vector::blas_wrapper_type BW; public: typedef Vector Base; Potential() : Vector() {} Potential(int n_elements) : Vector(n_elements) {}
Function: print
Copy data back from device to host and dump it to screen.
void print(std::ostream &out) const { std::vector<T> tmp(this->__n); T * dst_ptr = &tmp[0]; const T * src_ptr = this->val(); BW::GetVector(this->__n, src_ptr, 1, dst_ptr, 1); int dim_x, dim_y; dim_x = pow(this->__n, 1/3.); while (dim_x*dim_x*dim_x > this->__n) if (dim_x*dim_x*dim_x > this->__n) --dim_x; while (dim_x*dim_x*dim_x < this->__n) if (dim_x*dim_x*dim_x < this->__n) ++dim_x; dim_y = dim_x * dim_x; Assert((dim_x*dim_x*dim_x) == this->__n, ::ExcMessage("Bummer")); for (int i = 0; i < this->__n; i=i+dim_y){ out<<std::endl; for (int j = i; j<dim_y+i ; j+=dim_x){ out<<std::endl; for (int k = j; k<dim_x+j; ++k){ out<< std::fixed << std::setprecision(3) << tmp[k]<<" "; } } } out<<std::endl; out<<std::endl; }
Function: print_gnu_plot
Copy data back from device to host and print it to file in the form that it can be used by Gnuplot.
void print_gnu_plot(std::ostream &out) const { std::vector<T> tmp(this->__n); T * dst_ptr = &tmp[0]; const T * src_ptr = this->val(); BW::GetVector(this->__n, src_ptr, 1, dst_ptr, 1); T dim_x, dim_2; dim_x = pow(this->__n,1/3.); / *dim_x++;* / dim_2 = pow(dim_x,2); / * for (int i = 0; i < this->__n; i++){ out<<tmp[i]<<"\n"; }* / dim_x = (int)dim_x+1; dim_2 = (int)dim_2+1; out<< "#" << dim_x<<std::endl; out<< "#" << dim_2<<std::endl; out<< "#" << this->__n<<std::endl; for (int i = 0; i < this->__n; i=i+dim_2){ out<<std::endl; for (int j = i; j<dim_2+i ; j+=dim_x){ out<<std::endl; for (int k = j; k<dim_x+j; ++k){ out<< std::fixed << std::setprecision(6) << tmp[k]<<"\n"; / *if((k-(int)dim_x-1)%(int)dim_2 == 0){ out<<tmp[k]<<" "; } out<<tmp[k]<<" ";* / } } } out<<std::endl; out<<std::endl; }
Function: print_transfer
Copy data back from device to host and dump the output to the screen. Used for unit test purposes. Prints only the part of the vector used by transfer operators
void print_transfer(std::ostream &out, int mesh, int max_level) const { std::vector<T> tmp(this->__n); T * dst_ptr = &tmp[0]; const T * src_ptr = this->val(); BW::GetVector(this->__n, src_ptr, 1, dst_ptr, 1); int dim_y, dim_z; int sum; int dim_x = mesh; int start = 0; for(int l = 0; l<max_level+1; l++) { if(l==0) dim_x = dim_x; else dim_x =((dim_x-1)*2)+1; dim_y = dim_x * dim_x; dim_z = dim_x * dim_x * dim_x; out<< "whole : " << this->__n<<std::endl; out<< "dim x : " << dim_x<<std::endl; out<< "dim x * dim y : " << dim_y<<std::endl; out<< "dim x * dim y * dim z : " << dim_z<<std::endl; / *Assert((dim_x*dim_x*dim_x) == this->__n, ::ExcMessage("Bummer"));* / out<<std::endl; out<<std::endl; for (int i = start; i<dim_z+start; i=i+dim_y){ out<<std::endl; for (int j = i; j<dim_y+i ; j+=dim_x){ out<<std::endl; for (int k = j; k<dim_x+j; ++k){ out<< std::fixed << std::setprecision(3) << tmp[k]<<" "; } } } out<<std::endl; / *start* / start += dim_z; } }
Function: print_multigrid_gnu
Copy data back from device to host and print the output to the file. Used by the whole MG-algoritm
void print_multigrid_gnu(std::ostream &out, int mesh, int max_level) const { std::vector<T> tmp(this->__n); T * dst_ptr = &tmp[0]; const T * src_ptr = this->val(); BW::GetVector(this->__n, src_ptr, 1, dst_ptr, 1); int dim_y, dim_z; int dim_x = mesh; int start = 0; for(int l = 0; l<=max_level; l++) { if(l==0) dim_x = dim_x; else dim_x =((dim_x-1)*2)+1; dim_y = dim_x * dim_x; dim_z = dim_x * dim_x * dim_x; out<< "#whole : " << this->__n<<std::endl; out<< "#dim x : " << dim_x<<std::endl; out<< "#dim x * dim y : " << dim_y<<std::endl; out<< "#dim x * dim y * dim z : " << dim_z<<std::endl; / *Assert((dim_x*dim_x*dim_x) == this->__n, ::ExcMessage("Bummer"));* / out<<std::endl; out<<std::endl; for (int i = start; i<dim_z+start; i=i+dim_y){ out<<std::endl; for (int j = i; j<dim_y+i ; j+=dim_x){ out<<std::endl; for (int k = j; k<dim_x+j; ++k){ if(l == max_level) out<< std::fixed << std::setprecision(6) << tmp[k]<<"\n"; } } } out<<std::endl; start += dim_z; } } private: Potential(const Potential& / *other* /) {} Potential & operator = (const Potential& / *other* /) {} }; private: Potential phi; Potential e_H; };
Klasse: CUDADriver
Diese Klasse steuert die host-device-Kommunikation, also Datentransfer und wann welcher Kernel aufgerufen wird. Die Dokumentation der member-Funktionen steht bei und in der Implementierung, d.h. im cu-file.
template<typename T> class CUDADriver { const SimParam * __params; public: typedef typename blas_pp<T,cublas>::Vector Vector; CUDADriver(const SimParam &p) : __params(&p) { Vector::blas_wrapper_type::Init(); cudaThreadSynchronize(); } ~CUDADriver() { Vector::blas_wrapper_type::Shutdown(); } void coarse_CG_solver();
Class: Potential
This main purpose of this class is to provide some means to copy data back from device to host.
class Potential : public Vector { typedef typename Vector::blas_wrapper_type BW; public: typedef Vector Base; Potential() : Vector() {} Potential(int n_elements) : Vector(n_elements) {}
Function: print
Copy data back from device to host and dump it to screen.
void print(std::ostream &out) const { std::vector<T> tmp(this->__n); T * dst_ptr = &tmp[0]; const T * src_ptr = this->val(); BW::GetVector(this->__n, src_ptr, 1, dst_ptr, 1); int dim_x, dim_y; dim_x = pow(this->__n, 1/3.); while (dim_x*dim_x*dim_x > this->__n) if (dim_x*dim_x*dim_x > this->__n) --dim_x; while (dim_x*dim_x*dim_x < this->__n) if (dim_x*dim_x*dim_x < this->__n) ++dim_x; dim_y = dim_x * dim_x; Assert((dim_x*dim_x*dim_x) == this->__n, ::ExcMessage("Bummer")); for (int i = 0; i < this->__n; i=i+dim_y){ out<<std::endl; for (int j = i; j<dim_y+i ; j+=dim_x){ out<<std::endl; for (int k = j; k<dim_x+j; ++k){ out<< std::fixed << std::setprecision(3) << tmp[k]<<" "; } } } out<<std::endl; out<<std::endl; }
Function: print_gnu_plot
Copy data back from device to host and print it to file in the form that it can be used by Gnuplot.
void print_gnu_plot(std::ostream &out) const { std::vector<T> tmp(this->__n); T * dst_ptr = &tmp[0]; const T * src_ptr = this->val(); BW::GetVector(this->__n, src_ptr, 1, dst_ptr, 1); T dim_x, dim_2; dim_x = pow(this->__n,1/3.); / *dim_x++;* / dim_2 = pow(dim_x,2); / * for (int i = 0; i < this->__n; i++){ out<<tmp[i]<<"\n"; }* / dim_x = (int)dim_x+1; dim_2 = (int)dim_2+1; out<< "#" << dim_x<<std::endl; out<< "#" << dim_2<<std::endl; out<< "#" << this->__n<<std::endl; for (int i = 0; i < this->__n; i=i+dim_2){ out<<std::endl; for (int j = i; j<dim_2+i ; j+=dim_x){ out<<std::endl; for (int k = j; k<dim_x+j; ++k){ out<< std::fixed << std::setprecision(6) << tmp[k]<<"\n"; / *if((k-(int)dim_x-1)%(int)dim_2 == 0){ out<<tmp[k]<<" "; } out<<tmp[k]<<" ";* / } } } out<<std::endl; out<<std::endl; }
Function: print_transfer
Copy data back from device to host and dump the output to the screen. Used for unit test purposes. Prints only the part of the vector used by transfer operators
void print_transfer(std::ostream &out, int mesh, int max_level) const { std::vector<T> tmp(this->__n); T * dst_ptr = &tmp[0]; const T * src_ptr = this->val(); BW::GetVector(this->__n, src_ptr, 1, dst_ptr, 1); int dim_y, dim_z; int sum; int dim_x = mesh; int start = 0; for(int l = 0; l<max_level+1; l++) { if(l==0) dim_x = dim_x; else dim_x =((dim_x-1)*2)+1; dim_y = dim_x * dim_x; dim_z = dim_x * dim_x * dim_x; out<< "whole : " << this->__n<<std::endl; out<< "dim x : " << dim_x<<std::endl; out<< "dim x * dim y : " << dim_y<<std::endl; out<< "dim x * dim y * dim z : " << dim_z<<std::endl; / *Assert((dim_x*dim_x*dim_x) == this->__n, ::ExcMessage("Bummer"));* / out<<std::endl; out<<std::endl; for (int i = start; i<dim_z+start; i=i+dim_y){ out<<std::endl; for (int j = i; j<dim_y+i ; j+=dim_x){ out<<std::endl; for (int k = j; k<dim_x+j; ++k){ out<< std::fixed << std::setprecision(3) << tmp[k]<<" "; } } } out<<std::endl; / *start* / start += dim_z; } }
Function: print_multigrid_gnu
Copy data back from device to host and print the output to the file. Used by the whole MG-algoritm
void print_multigrid_gnu(std::ostream &out, int mesh, int max_level) const { std::vector<T> tmp(this->__n); T * dst_ptr = &tmp[0]; const T * src_ptr = this->val(); BW::GetVector(this->__n, src_ptr, 1, dst_ptr, 1); int dim_y, dim_z; int dim_x = mesh; int start = 0; for(int l = 0; l<=max_level; l++) { if(l==0) dim_x = dim_x; else dim_x =((dim_x-1)*2)+1; dim_y = dim_x * dim_x; dim_z = dim_x * dim_x * dim_x; out<< "#whole : " << this->__n<<std::endl; out<< "#dim x : " << dim_x<<std::endl; out<< "#dim x * dim y : " << dim_y<<std::endl; out<< "#dim x * dim y * dim z : " << dim_z<<std::endl; / *Assert((dim_x*dim_x*dim_x) == this->__n, ::ExcMessage("Bummer"));* / out<<std::endl; out<<std::endl; for (int i = start; i<dim_z+start; i=i+dim_y){ out<<std::endl; for (int j = i; j<dim_y+i ; j+=dim_x){ out<<std::endl; for (int k = j; k<dim_x+j; ++k){ if(l == max_level) out<< std::fixed << std::setprecision(6) << tmp[k]<<"\n"; } } } out<<std::endl; start += dim_z; } } private: Potential(const Potential& / *other* /) {} Potential & operator = (const Potential& / *other* /) {} }; private: Potential phi; Potential e_H; }; } // namespace step12 END #endif // CUDADriver_STEP_12_H #ifndef CUDA_DRIVER_STEP_12_HH #define CUDA_DRIVER_STEP_12_HH #include "cuda_driver_step-12.h" #include <fstream> #include <QString> #include <base/timer.h> #include <base/CUDATimer.h> #include <base/convergence_table.h>
Declarations of kernel wrapper functions
#include "cuda_kernel_wrapper_step-12.cu.h" #include <cutil_inline.h>
Funktion: test_coarse_CG_solver()
Test of the coarse grid solver.
template<typename T> void step12::CUDAUnitTestDriver<T>::test_coarse_CG_solver() { int n_intervals_per_dim = MESH_DIM-1; int n_points_per_dim = n_intervals_per_dim+1; int n_points = n_points_per_dim * n_points_per_dim * n_points_per_dim; Potential reference_solution; ::ConvergenceTable convergence_history; for (int iter = 1; iter < coarse_cg_max_iter; iter++) { phi.reinit(n_points); { std::vector<T> tmp(n_points);
For testing the correctness of the solver we generate a kind-of random reference solution ...
for (int k = 0; k < n_points; k++) tmp[k] = 1 + std::sin(k);
... and copy it to the device.
typename Potential::Base & rs_ref = reference_solution; rs_ref = tmp; int x, y, z;
Now, set the interior points to zero ...
for (int i = 0; i < n_points; i++) { x = i%n_points_per_dim; y = (i%(n_points_per_dim*n_points_per_dim))/n_points_per_dim; z = i/(n_points_per_dim * n_points_per_dim); bool boundary = (x == 0) || (x == n_intervals_per_dim) || (y == 0) || (y == n_intervals_per_dim) || (z == 0) || (z == n_intervals_per_dim); if (!boundary) tmp[i] = 0; }
and use this as initial condition by putting it into the solution vector.
typename Potential::Base & ref = phi; ref = tmp; phi.print(std::cout); } if(print_sols){ std::cout << "||Phi_ref||_2 : " << reference_solution.l2_norm() << std::endl; } if(print_sols) { std::cout << "Phi_ref : " << std::endl; reference_solution.print(std::cout); } if(print_sols){ std::cout << "||Phi_0||_2 : " << phi.l2_norm() << std::endl; std::cout << "Phi_0: \n\n"; } if(print_sols) phi.print(std::cout); T tolerance = cg_tol;
store r_k_1, alpha, beta in one array
typename Potential::Base residual(7*coarse_cg_max_iter+2); { std::vector<T> tmp(residual.size(), 0.); residual = tmp; } CUDATimer cg_timer; coarse_grid_CG_solve_unit_test(phi.array().val(), n_points_per_dim, tolerance, iter, residual.array().val()); if(print_sols) cg_timer.print_elapsed("Time spent in coarse grid solve : "); if(print_sols) std::cout<< "||Phi_final||_2 : " << phi.l2_norm()<<std::endl; if(print_sols){ std::cout << "N Threads : " << N_COARSE_GRID_THREADS << ", N elements : " << phi.size() << ", Residuals: \n\n" << std::setprecision(10);
residual.print();
std::cout << "Phi: \n\n"; } if(print_sols) phi.print(std::cout);
Compare solutions.
phi -= reference_solution;
if(print_sols)
std::cout << "Phi_final - Phi_ref: \n\n";
if(print_sols)
phi.print(std::cout);
double l2_abs_error = phi.l2_norm();
double l2_rel_error = l2_abs_error / reference_solution.l2_norm();
if(print_sols){
print convergence summary
std::cout<< "||Phi_final - Phi_ref||_2 : " << std::setprecision(10) << l2_abs_error << "\n" << "||Phi_final - Phi_ref||_2 / ||Phi_ref||_2 : " << l2_rel_error << std::endl; convergence_history.add_value("# iter", iter); convergence_history.add_value("||u - u_h||_2", double(l2_abs_error) ); convergence_history.set_precision ("||u - u_h||_2", 16); convergence_history.add_value("||u - u_h||_2/||u||_2", double(l2_rel_error) ); convergence_history.set_precision ("||u - u_h||_2/||u||_2", 16); } } { QString filename = "unit_test_coarse_grid_cg_"; int np = N_POINTS_PHI; filename += QString::number(np); filename += "_points.dat"; std::ofstream out(filename.toAscii()); convergence_history.write_text(out); } { std::ofstream out("phi_out_coarse.dat"); phi.print_gnu_plot(out); } }
Funktion: coarse_CG_solver()
Running the coarse grid solver.
template<typename T> void step12::CUDADriver<T>::coarse_CG_solver() { int n_intervals_per_dim = MESH_DIM-1; int n_points_per_dim = n_intervals_per_dim+1; int n_points = n_points_per_dim * n_points_per_dim * n_points_per_dim;
system size
T L = 1.;
radius of charged sphere
T R = .3;
cell size
T h = L/n_intervals_per_dim;
phi.reinit(n_points);
{
As initial solution we use a vector containing zeros
std::vector<T> tmp(n_points, 0.);
... and copy it to the device.
typename Potential::Base & ref = phi;
ref = tmp;
}
T tolerance = cg_tol;
store r_k_1, alpha, beta in one array
typename Potential::Base residual(7*coarse_cg_max_iter+2); { std::vector<T> tmp(residual.size(), 0.); residual = tmp; } coarse_grid_CG_solve(phi.array().val(), n_points_per_dim, tolerance, R, h, coarse_cg_max_iter, residual.array().val()); std::ofstream out("phi_out_coarse.dat"); phi.print_gnu_plot(out); }
Funktion: test_gauss_seidel
This function calls the kernel gauss_seidel
template<typename T> void step12::CUDAUnitTestDriver<T>::test_gauss_seidel() { int n_intervals_per_dim = MESH_DIM-1; int n_points_per_dim = n_intervals_per_dim+1; int n_points = n_points_per_dim * n_points_per_dim * n_points_per_dim; static const bool print_sols = false; static const int max_iter = 50; static const double tol = 1e-12;
system size
T L = 1.;
radius of charged sphere
T R = .25;
T h = L/n_intervals_per_dim;
Potential reference_solution, sol_diff;
::ConvergenceTable convergence_history;
std::vector<T> sol_ref_host(n_points);
phi.reinit(n_points);
e_H.reinit(n_points);
{
std::vector<T> tmp(n_points);
For testing the correctness of the solver we generate a kind-of random reference solution ...
for (int k = 0; k < n_points; k++) { sol_ref_host[k] = 1 + std::sin(k);
sol_ref_host[k] = std::exp(1/k);
tmp[k] = sol_ref_host[k];
}
... and copy it to the device.
typename Potential::Base & rs_ref = reference_solution; rs_ref = sol_ref_host; int x, y, z;
Now, set the interior points to zero ...
for (int i = 0; i < n_points; i++) { x = i%n_points_per_dim; y = (i%(n_points_per_dim*n_points_per_dim))/n_points_per_dim; z = i/(n_points_per_dim * n_points_per_dim); bool boundary = (x == 0) || (x == n_intervals_per_dim) || (y == 0) || (y == n_intervals_per_dim) || (z == 0) || (z == n_intervals_per_dim); if (!boundary) tmp[i] = 0; }
and use this as initial condition by putting it into the solution vector.
typename Potential::Base & ref = phi; ref = tmp; } std::cout << "||Phi_ref||_2 : " << reference_solution.l2_norm() << std::endl; if(print_sols) { std::cout << "Phi_ref : " << std::endl; reference_solution.print(std::cout); } std::cout << "||Phi_0||_2 : " << phi.l2_norm() << std::endl; std::cout << "Phi_0: \n\n"; if(print_sols) phi.print(std::cout); T tolerance = tol;
store r_k_1, alpha, beta in one array
typename Potential::Base residual(7*coarse_cg_max_iter+2); { std::vector<T> tmp(residual.size(), 0.); residual = tmp; } double l2_abs_error; double l2_rel_error; CUDATimer gaus_seidel_timer; for (int iter = 0; iter < max_iter; iter++) { gauss_seidel_unit_test(phi.array().val(), n_intervals_per_dim, R, h ); typename Potential::Base & sol_diff_ref = sol_diff; sol_diff_ref = sol_ref_host; / *sol_diff = phi;* / sol_diff -= phi; // reference_solution; l2_abs_error = sol_diff.l2_norm(); l2_rel_error = l2_abs_error / reference_solution.l2_norm(); convergence_history.add_value("# iter", iter); convergence_history.add_value("||u - u_h||_2", double(l2_abs_error) ); convergence_history.set_precision ("||u - u_h||_2", 16); convergence_history.add_value("||u - u_h||_2/||u||_2", double(l2_rel_error) ); convergence_history.set_precision ("||u - u_h||_2/||u||_2", 16); } MG_reference_solution(e_H.array().val(),phi.array().val(), n_intervals_per_dim, h, 0.25, true); gaus_seidel_timer.print_elapsed("Time spent in seidel grid solve : "); { std::ofstream out("phi_out_seidel.dat"); phi.print_gnu_plot(out); } { std::ofstream out("phi_out_seidel_reference.dat"); e_H.print_gnu_plot(out); } std::cout<< "||Phi_final||_2 : " << phi.l2_norm()<<std::endl; std::cout << "N Threads : " << N_COARSE_GRID_THREADS << ", N elements : " << phi.size(); std::cout << "Phi: \n\n"; if(print_sols) phi.print(std::cout);
Compare solutions.
phi -= reference_solution;
std::cout << "Phi_final - Phi_ref: \n\n";
if(print_sols)
phi.print(std::cout);
print convergence summary
std::cout<< "||Phi_final - Phi_ref||_2 : " << std::setprecision(10) << l2_abs_error << "\n" << "||Phi_final - Phi_ref||_2 / ||Phi_ref||_2 : " << l2_rel_error << std::endl; { QString filename = "unit_test_gauss_seidel_"; int np = N_POINTS_PHI; filename += QString::number(np); filename += "_points.dat"; std::ofstream out(filename.toAscii()); convergence_history.write_text(out); } std::cout<< "||Error_final||_2 : " << e_H.l2_norm()<<std::endl; }
Funktion: test_Multigrid()
The function tests the whole multigrid algorithm
template<typename T> void step12::CUDAUnitTestDriver<T>::test_Multigrid() { int ncycle = 1; int max_level = 1; int max_iter = 50; int n_intervals_per_dim; int back; bool prolongation; int n_points = MESH_DIM * MESH_DIM * MESH_DIM; int start_n_points = n_points; T tolerance = cg_tol; int start_intervals_per_dim = MESH_DIM-1; int max_intervals_per_dim = start_intervals_per_dim; int last_interval = start_intervals_per_dim; int max_n_points = n_points; for(int i = 0; i<max_level; i++) { last_interval = last_interval * 2; max_intervals_per_dim =last_interval; max_n_points += (max_intervals_per_dim+1) *(max_intervals_per_dim+1) *(max_intervals_per_dim+1); } T * u_h; T * u_H; T * diff; T * e_h;
system size
T L = 1.;
radius of charged sphere
T sigma = .25;
T R = .25;
T h = L/start_intervals_per_dim;
printf("whole phi --> %d\n",max_n_points);
phi.reinit(max_n_points);
e_H.reinit(max_n_points);
phi *= 0;
cudaThreadSynchronize();
typename Potential::Base residual(7*coarse_cg_max_iter+2);
{
std::vector<T> tmp(residual.size(), 0.);
residual = tmp;
}
u_h = phi.array().val();
u_H = phi.array().val();
diff= phi.array().val();
e_h = e_H.array().val();
n_intervals_per_dim = start_intervals_per_dim;
Start of the multigrid
for (int level = 0; level <=max_level; level++) { for(int n_cycle = ncycle; n_cycle > 0; n_cycle--) { u_h = phi.array().val(); u_H = phi.array().val(); n_points = start_n_points;
go up
for(int up = 1; up <=level; up++) { prolongation = true; u_H = u_h; u_h +=n_points; n_intervals_per_dim *= 2 ; h = L/n_intervals_per_dim;
prolongate
grid_transfer(u_H, u_h, n_intervals_per_dim, prolongation);
n_points = (n_intervals_per_dim+1)
*(n_intervals_per_dim+1)
*(n_intervals_per_dim+1);
for(int g = 0; g<max_iter; g++)
gauss_seidel(u_h, n_intervals_per_dim,h,sigma);
printf("UPgauss(%d) ", n_points);
printf("--> Pro u_H --> %d , u_h --> %d \n", u_H-diff, u_h - diff);
}
go down
for(int down = level; down >0 ; down--) { prolongation = false;
restriction
n_intervals_per_dim /= 2 ;
back = n_intervals_per_dim /2;
h = L/n_intervals_per_dim;
grid_transfer(u_H, u_h, n_intervals_per_dim, prolongation);
n_points = (n_intervals_per_dim+1)
*(n_intervals_per_dim+1)
*(n_intervals_per_dim+1);
if(down == 1){
printf("\ncg(%d)-->", n_points);
printf("Restr u_H --> %d , u_h --> %d\n", u_H-diff, u_h-diff);
coarse_grid_CG_solve(phi.array().val(), MESH_DIM, tolerance, sigma, h,
coarse_cg_max_iter,
residual.array().val());
}
else{
printf("DOWNgauss(%d) --> ", n_points);
printf("Restr u_H --> %d , u_h --> %d\n", u_H-diff, u_h-diff);
for(int g = 0; g<max_iter; g++)
gauss_seidel(u_H, n_intervals_per_dim,h,sigma);
}
u_h = u_H;
u_H -=((back+1)*(back+1)*(back+1)) ;
}
if(level == 0 && !(level == 0 && n_cycle != ncycle)){
coarse_grid_CG_solve(phi.array().val(), MESH_DIM, tolerance, sigma, h,
coarse_cg_max_iter,
residual.array().val());
printf("cg(%d) ", n_points);
printf("First u_H --> %d , u_h --> %d\n", u_H-diff, u_h-diff);
}
printf("\n");
}
}
n_points = start_n_points;
u_h = phi.array().val();
n_intervals_per_dim=start_intervals_per_dim;
go up
for(int level = 1; level <=max_level; level++) { u_H = u_h; prolongation = true; n_intervals_per_dim *= 2 ; h = L/n_intervals_per_dim;
prolongate
grid_transfer(u_h, u_H, n_intervals_per_dim, prolongation);
u_h +=n_points;
e_h +=n_points;
n_points = (n_intervals_per_dim+1)
*(n_intervals_per_dim+1)
*(n_intervals_per_dim+1);
printf("end_gauss(%d) ", n_points);
printf("--> Pro U_H --> %d , U_h --> %d \n", u_H-diff, u_h-diff);
for(int g = 0; g<max_iter; g++)
gauss_seidel(u_h, n_intervals_per_dim,h,sigma);
}
printf("\n");
true -> reference solution false -> error
bool reference_or_error; reference_or_error = true;
reference_or_error = false;
MG_reference_solution(e_h,u_h,n_intervals_per_dim,h,sigma,reference_or_error);
/ *std::cout<<phi.l2_norm()<<std::endl;* /
phi.print(std::cout);
phi.print_transfer(std::cout, MESH_DIM, max_level ); e_H.print_transfer(std::cout, MESH_DIM, max_level );
std::ofstream out("phi_multi_out.dat"); phi.print_multigrid_gnu(out, MESH_DIM, max_level); if(reference_or_error) { std::ofstream out2("phi_multi_out_reference.dat"); e_H.print_multigrid_gnu(out2, MESH_DIM, max_level); }else { std::ofstream out2("phi_multi_out_error.dat"); e_H.print_multigrid_gnu(out2, MESH_DIM, max_level); std::cout<< "||Final_Error||_2 : " << e_H.l2_norm()<<std::endl; } }
Funktion: test_grid_transfer()
The function iterates over the testing parameters and calls the grid_grid_transfer_implementation with chosen parameter
template<typename T> void step12::CUDAUnitTestDriver<T>::test_grid_transfer() { if (this->__params->transfer_tests.empty()) { std::cout << __FUNCTION__ << ": nothing to be done.\n"; return; } std::map<QString, Selectors::TransferTestfunction>::const_iterator tf=this->__params->transfer_tests.begin(); for(; tf!=this->__params->transfer_tests.end(); ++tf) { std::cout << "Testing function : " << tf->first.toStdString() << std::endl; this->test_grid_transfer_implementation(tf->second); } }
Funktion: test_grid_transfer_implementation
The function tests transfer operators It calls prolongation_unit_test and restriction unit_test
template<typename T> void step12::CUDAUnitTestDriver<T>::test_grid_transfer_implementation(Selectors::TransferTestfunction test_function) { int ncycle = 1; if(this->__params->n_cycle == "v") ncycle = 1; else if(this->__params->n_cycle == "w") ncycle = 2; int max_level = this->__params->max_level+1; int n_intervals_per_dim; int back; bool prolongation; int n_points = MESH_DIM * MESH_DIM * MESH_DIM; int start_n_points = n_points; int start_intervals_per_dim = MESH_DIM-1; int max_intervals_per_dim = start_intervals_per_dim; int last_interval = start_intervals_per_dim; int max_n_points = n_points; int restriction_first_n_points,first_n_intervals_per_dim; for(int i = 0; i<max_level; i++) { last_interval = last_interval * 2; max_intervals_per_dim =last_interval; max_n_points += (max_intervals_per_dim+1) *(max_intervals_per_dim+1) *(max_intervals_per_dim+1); } if(this->__params->disp_mem_consumption) std::cout << "Estimated memory consumption of all solutions : " << max_n_points * sizeof(T)/(1024*1024*1024.) << " GByte" << std::endl; T * u_h; T * u_H; T * diff;
system size
T L = 1.;
T H = L/start_intervals_per_dim;
if(this->__params->disp_phi_max_size)
printf("whole phi --> %d\n\n",max_n_points);
phi.reinit(max_n_points);
phi *= 0;
cudaThreadSynchronize();
u_h = phi.array().val();
u_H = phi.array().val();
diff= phi.array().val();
n_intervals_per_dim = start_intervals_per_dim;
for (int level = 0; level <max_level; level++)
{
if(this->__params->disp_current_level)
printf("current level ---> %d\n", level);
for(int n_cycle = ncycle; n_cycle > 0; n_cycle--)
{
u_h = phi.array().val();
u_H = phi.array().val();
n_points = start_n_points;
n_intervals_per_dim = start_intervals_per_dim;
int current_level = 0; // coarsest level
::Timer prolongation_timer;
for(int up = 1; up <=level; up++, current_level++)
{
prolongation = true;
u_H = u_h;
u_h +=n_points;
e_H.reinit(n_points);
std::vector<T> tmp(n_points,0.);
... and copy it to the device.
typename Potential::Base & e_ref = e_H;
e_ref = tmp;
prolongate
n_intervals_per_dim *= 2 ;
T h = H/2;
grid_transfer(u_H, u_h, n_intervals_per_dim, R, h, prolongation);
prolongation_unit_test(u_H, u_h, e_H.array().val(),
n_intervals_per_dim, h, current_level, test_function);
cudaThreadSynchronize();
if(this->__params->disp_error_matrix)
e_H.print(std::cout);
if(this->__params->disp_pointer)
printf("\nPro u_H --> %d, u_h --> %d \n", u_H-diff, u_h - diff);
if(this->__params->disp_transfer_error)
printf("prolongation_error %e \n", e_H.l2_norm() / std::sqrt(e_H.size() ) );
if(this->__params->disp_transfer_dimension_resize_info)
printf("UPtransfer( %d to ", n_points);
n_points = (n_intervals_per_dim+1)
*(n_intervals_per_dim+1)
*(n_intervals_per_dim+1);
H/=2;
if(this->__params->disp_transfer_dimension_resize_info)
printf("%d )\n", n_points);
}
if(this->__params->disp_transfer_time)
std::cout << "Time elapsed in one prolongation from coarsest to finest grid : "<< prolongation_timer() << "sec." << std::endl;
::Timer restriction_timer;
current_level = 0;
for(int down = level; down >0 ; down--, current_level++)
{
first_n_intervals_per_dim = n_intervals_per_dim /2;
restriction_first_n_points = (first_n_intervals_per_dim+1)
*(first_n_intervals_per_dim+1)
*(first_n_intervals_per_dim+1);
e_H.reinit(restriction_first_n_points);
std::vector<T> tmp(restriction_first_n_points,0.);
... and copy it to the device.
typename Potential::Base & e_ref = e_H; e_ref = tmp; prolongation = false;
Restriction
T h = H;
restriction_unit_test(u_H, u_h, e_H.array().val(),
n_intervals_per_dim, h, current_level, test_function);
cudaThreadSynchronize();
if(this->__params->disp_error_matrix)
e_H.print(std::cout);
if(this->__params->disp_pointer)
printf("\nRestr u_H --> %d, u_h --> %d \n", u_H-diff, u_h-diff);
if(this->__params->disp_transfer_error)
printf("restriction_error %e \n", e_H.l2_norm() / std::sqrt(e_H.size() ) );
if(this->__params->disp_transfer_dimension_resize_info)
printf("Downtransfer( %d to ", n_points);
n_intervals_per_dim /= 2 ;
n_points = (n_intervals_per_dim+1)
*(n_intervals_per_dim+1)
*(n_intervals_per_dim+1);
H*=2;
if(this->__params->disp_transfer_dimension_resize_info)
printf("%d )\n", n_points);
u_h = u_H;
back = n_intervals_per_dim /2;
u_H -=((back+1)*(back+1)*(back+1));
}
if(this->__params->disp_transfer_time)
std::cout << "Time elapsed in one restriction from finest to coarsest grid : "<< restriction_timer() << "sec." << std::endl;
}
}
printf("\n");
if(this->__params->disp_data_matrix)
phi.print_transfer(std::cout, MESH_DIM, max_level-1 );
/ *std::cout<<phi.l2_norm()<<std::endl;* /
/ *phi.print(std::cout);* /
}
#endif
CUDA_DRIVER_STEP_12_HH
STL header
#include <iostream> #include <vector> #include <QString> #include <QStringList> #include <map>
Treiber fuer den GPU-Teil
#include "cuda_driver_step-12.h"
deal.II-Komponenten include <lac/vector.h>
#include <base/parameter_handler.h>
cublas-Wrapper-Klassen. Binden alle sonstigen benoetigten header-Dateien ein.
#include "cuda_driver_step-12.hh" namespace step12 {
Class: MyFancySimulation
This class controls the simulation of a physical problem.
class MyFancySimulation { public: MyFancySimulation(); void run_unit_tests(); void run(); private: }; }
Constructor: MyFancySimulation
The constructor should comlete the initialization of the simulation.
step12::MyFancySimulation::MyFancySimulation()
{
}
Function: run_unit_tests
The function runs the unit tests of chosen functionalities.
void step12::MyFancySimulation::run_unit_tests() { std::string prm_filename = "unit_tests.prm"; ::ParameterHandler prm_handler; SimParam::declare(prm_handler); prm_handler.read_input (prm_filename); SimParam params; params.get(prm_handler); std::ostringstream logfile_name; logfile_name << prm_filename << ".log"; std::ofstream out(logfile_name.str().c_str()); prm_handler.print_parameters(out, ::ParameterHandler::Text ); #ifdef USE_SINGLE_PRECISION step12::CUDAUnitTestDriver<float> mg_unit_test(params); #else step12::CUDAUnitTestDriver<double> mg_unit_test(params); #endif
mg_unit_test.test_coarse_CG_solver();
mg_unit_test.test_gauss_seidel();
mg_unit_test.test_grid_transfer();
mg_unit_test.test_Multigrid();
std::cout << "============== Unit tests Done. ==============\n\n" << std::endl;
}
Function: run
void step12::MyFancySimulation::run() { #ifdef USE_SINGLE_PRECISION / *step12::CUDADriver<float> mg_solver(params);* / #else / *step12::CUDADriver<double> mg_solver(params);* / #endif std::cout << "Fertig.!!!!!!!!!!!!!!!!!!!!" << std::endl; }
Function: main
int main(int / *argc* /, char * / *argv* /[]) { cudaSetDevice(1); using namespace step12; MyFancySimulation machma; machma.run_unit_tests(); / *machma.run();* / }
Results
All classes and functions needed for the Multigrid algorithm to work have been implemented and tested
The Gauss-Seidel Algorithm
The Gauss-Seidel algoritm is used as smoother at each level.
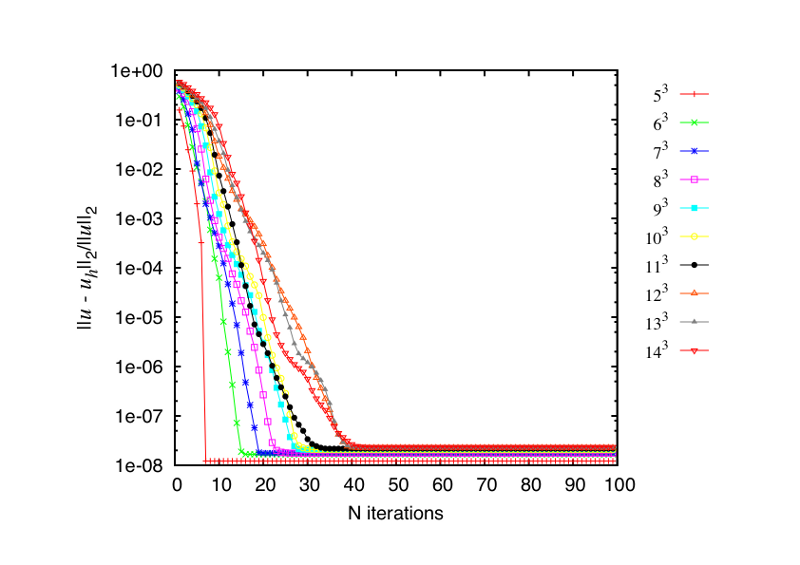
The Conjugate-Gradient Algorithm
The Cg-algorithm converges as it can be seen on ther picture below. The number of iterations needed to reach the prescribed tolerance of  depends on the number of unknowns
depends on the number of unknowns  . The number of iterations presumably grows like
. The number of iterations presumably grows like  . The maximal is chosen such that the coarse grid solution and the residual vector fits into the shared memory of one multiprocessor of the graphics card. The number of unknowns is given in the legend on the right-hand side in the figure below. For instance
. The maximal is chosen such that the coarse grid solution and the residual vector fits into the shared memory of one multiprocessor of the graphics card. The number of unknowns is given in the legend on the right-hand side in the figure below. For instance  means that the coarse grid consists of 14 points per spatial dimension, that is 2744 points in total.
means that the coarse grid consists of 14 points per spatial dimension, that is 2744 points in total.
Transfer Operators (prolongation and restriction)
Transfer operators are used to transfer data from one level to another. Prolongation and Restriction use multilinear interpolation to transfer. Both algorithms have been tested with the set of functions that can be interpolated exactly. These functions are  ,
,  ,
,  and
and  and all multilinear combinations of them, e.g.
and all multilinear combinations of them, e.g.  . As expected the Prolongation and Restriction operators produce no error interpolating mentioned functions.
. As expected the Prolongation and Restriction operators produce no error interpolating mentioned functions.
The operations are not computationally intensive. Especially the restriction operator computes less points than it reads. The main problem in implementation of the operators consists of controlling the memory bandwidth. In order to achive the best possible memory bandwith the update of the points should be done in possibly few steps of reading from one dimension and writing into other.
The solution that use shared memory to store the points that are needed to update different points at other dimension should be considered. The memory bandwidth has to be tested soon.
The example of the prolongation
As we can see the interpolation result for the function is exact.
Testing function : one UPtransfer( 27 to 125 ) prolongation_error 0.000000e+00
1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000
1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000
1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000
1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000
1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000
1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000
1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000
1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000 1.000
As expected the result of interpolating the function  is not exact anymore
is not exact anymore
Testing function : xx prolongation_error 1.482318e-03
0.000 0.250 1.000 0.000 0.250 1.000 0.000 0.250 1.000
0.000 0.250 1.000 0.000 0.324 1.000 0.000 0.250 1.000
0.000 0.250 1.000 0.000 0.250 1.000 0.000 0.250 1.000
0.000 0.062 0.250 0.562 1.000 0.000 0.062 0.250 0.562 1.000 0.000 0.062 0.250 0.562 1.000 0.000 0.062 0.250 0.562 1.000 0.000 0.062 0.250 0.562 1.000
0.000 0.062 0.250 0.562 1.000 0.000 0.114 0.278 0.614 1.000 0.000 0.119 0.279 0.619 1.000 0.000 0.114 0.278 0.614 1.000 0.000 0.062 0.250 0.562 1.000
0.000 0.062 0.250 0.562 1.000 0.000 0.119 0.279 0.619 1.000 0.000 0.125 0.281 0.625 1.000 0.000 0.119 0.279 0.619 1.000 0.000 0.062 0.250 0.562 1.000
0.000 0.062 0.250 0.562 1.000 0.000 0.114 0.278 0.614 1.000 0.000 0.119 0.279 0.619 1.000 0.000 0.114 0.278 0.614 1.000 0.000 0.062 0.250 0.562 1.000
0.000 0.062 0.250 0.562 1.000 0.000 0.062 0.250 0.562 1.000 0.000 0.062 0.250 0.562 1.000 0.000 0.062 0.250 0.562 1.000 0.000 0.062 0.250 0.562 1.000
The following parameter file has been used for testing of transfer operators
# Listing of Parameters # --------------------- subsection Grid transfer tests # Displaying level of a current multigrid cycle, 0 at the bottom set Display current level = flase
# Displaying dimensions of the curent reference solution matrix set Display dimension information = true
# Displaying error matrix of one resizing step set Display error matrix = false
# Displaying grid size of the maximum level set Display finest grid size = flase
# Displaying memory consumption of all solutions set Display memory consumption = false
# Displaying begin of the areas within the whole refernce solution vector set Display pointers = false
# Displaying current reference solution matrix containing actual data set Display reference solution = true
# Displaying l2 norm of the error vector of one resizing step. set Display transfer error = true
# Displaying transfer time between two levels set Display transfer time = false
# Maximum level of multigrid cycles. # Possible values : 1,2,3... set Max level = 2
# Functions for testing the multigrid transfer. Transfer is done via # multilinear interpolation.Test functions comprise the set of functions # that can be transferred exactly (all multilinear combinations of one, # x,y,z)and several which are quadratic or cubic in one component in order # to reproduceinterpolation errors.Possible values : one, x, y, z, xy, xz, # yz, xyz, xx, yy, zz, xxyy, xxyz, yyzz, xyyz, xyzz, xyzzz set Test functions = xx
# Type of Cycle(v,w).Multigrid cycles types defined in Weseling # Possible # values: v,w set Type of cycle = v end
The plain program
(If you are looking at a locally installed CUDA HPC Praktikum version, then the program can be found at .. /.. /testsite / /step-12 /step-cu.cc . Otherwise, this is only the path on some remote server.)
#ifndef CUDA_KERNEL_STEP_12_CU_H #define CUDA_KERNEL_STEP_12_CU_H #define TILE_SIZE 6 #define MESH_DIM 3 #if MESH_DIM==3 #define N_POINTS_PHI 27 #elif MESH_DIM==4 #define N_POINTS_PHI 64 #elif MESH_DIM==5 #define N_POINTS_PHI 125 #elif MESH_DIM==6 #define N_POINTS_PHI 216 #elif MESH_DIM==7 #define N_POINTS_PHI 343 #elif MESH_DIM==8 #define N_POINTS_PHI 512 #elif MESH_DIM==9 #define N_POINTS_PHI 729 #elif MESH_DIM==10 #define N_POINTS_PHI 1000 #elif MESH_DIM==11 #define N_POINTS_PHI 1331 #elif MESH_DIM==12 #define N_POINTS_PHI 1728 #elif MESH_DIM==13 #define N_POINTS_PHI 2197 #elif MESH_DIM==14 #define N_POINTS_PHI 2744 #endif #define N_COARSE_GRID_THREADS 256 static const bool print_sols = false; static const int coarse_cg_max_iter = 100; static const double cg_tol = 1e-12; struct Selectors { enum TransferTestfunction { one, x, y, z, xy, xz, yz, xyz, xx, yy, zz, xxyy, xxyz, yyzz, xyyz, xyzz, xyzzz }; };
void coarse_grid_CG_solve_unit_test(float* phi, int n_coarse_points_per_dim, float tolerance, int max_iter, float* residual); void coarse_grid_CG_solve(float* phi, int n_coarse_points_per_dim, float tolerance, float R, float h, int max_iter, float * residual); void gauss_seidel(float* phi, int n_intervals_per_dim, float R, float h); void grid_transfer(float* phi, float* test, int n_intervals_per_dim, bool prolongation); void MG_reference_solution(float* e_h, float* u_h, int n_intervals_per_dim, float h, float sigma, bool reference_or_error); #ifndef USE_SINGLE_PRECISION void coarse_grid_CG_solve_unit_test(double* phi, int n_coarse_points_per_dim, double tolerance, int max_iter, double* residual); void coarse_grid_CG_solve(double* phi, int n_coarse_points_per_dim, double tolerance, double R, double h, int max_iter, double * residual); void gauss_seidel(double* phi, int n_intervals_per_dim, double R, double h); void gauss_seidel_unit_test(double* phi, int n_intervals_per_dim, double R, double h); void grid_transfer(double* phi, double * test, int n_intervals_per_dim, bool prolongation); void prolongation_unit_test( double * u_H, double * u_h, double* e_H, int n_intervals_per_dim, double h, int current_level, Selectors::TransferTestfunction ftest); void restriction_unit_test( double * u_H, double * u_h, double* e_H, int n_intervals_per_dim, double h, int current_level, Selectors::TransferTestfunction ftest); void MG_reference_solution(double* e_h, double* u_h, int n_intervals_per_dim, double h, double sigma, bool reference_or_error); #endif #endif // CUDA_KERNEL_STEP_12_CU_H #include <cutil_inline.h> #include <cuda_kernel_wrapper_step-12.cu.h> #define RED_BLACK_DEBUG #undef RED_BLACK_DEBUG #define RHS_DEBUG #undef RHS_DEBUG
template <typename T> class Constant{ public: typedef T NumberType; __device__ Constant(){} __forceinline__ __device__ const T operator ()(const T x, const T y ,const T z) const { return 1; } };
template <typename T> class X{ public: typedef T NumberType; __device__ X(){} __forceinline__ __device__ const T operator ()(const T x, const T y ,const T z) const { return x; } };
template <typename T> class Y{ public: typedef T NumberType; __device__ Y(){} __forceinline__ __device__ const T operator ()(const T x, const T y ,const T z) const { return y; } };
template <typename T> class Z{ public: typedef T NumberType; __device__ Z(){} __forceinline__ __device__ const T operator ()(const T x, const T y ,const T z) const { return z; } };
template<typename FX, typename FY, typename FZ> class F{ public: typedef typename FX::NumberType NumberType; typedef typename FX::NumberType T; __device__ F() : fx(), fy(), fz() {} __forceinline__ __device__ const T operator() (const T x, const T y, const T z) const { return fx(x,y,z) * fy(x,y,z) * fz(x,y,z); } private: FX fx; FY fy; FZ fz; };
template<typename T> class MG_Unit_Test_Curved_Ridges{ public: typedef LaplaceOp<T> DiffOp; MG_Unit_Test_Curved_Ridges(){} class RHS{ public: RHS(int n_points_per_dim,T h) : _n_points_per_dim(n_points_per_dim), _h(h) {} __forceinline__ __device__ T operator () (const dim3 &grid_pos) const { Stencil stencil(_n_points_per_dim); stencil (grid_pos); int n_intervals_per_dim = _n_points_per_dim-1; bool boundary = (grid_pos.x == 0) || (grid_pos.x == n_intervals_per_dim) || (grid_pos.y == 0) || (grid_pos.y == n_intervals_per_dim) || (grid_pos.z == 0) || (grid_pos.z == n_intervals_per_dim); if (boundary) return ref_sol(grid_pos); else return / *partial with respect to x * / 5 * M_PI *( 10 * M_PI*(grid_pos.x*_h) *(cos(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h)))) *(cos(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h)))) *(exp(2*sin(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h)))) - 8 * grid_pos.z * grid_pos.z ) +(exp(2*sin(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h)))) - 8 * grid_pos.z * grid_pos.z ) *(cos(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h)))) + 5 *M_PI*(grid_pos.*_h + 1) * (sin(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h)))) ) / *partial with respect to y * / + 10 * M_PI*(grid_pos.*_h + 1) *((10*M_PI*grid_pos.y*_h * grid_pos.y * _h) *(cos(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h)))) *(cos(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h))))) *(exp(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h)))) - 4 * grid_pos.z * grid_pos.z +(exp(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h)))) - 4 * grid_pos.z * grid_pos.z *(cos(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h)))) -(5*M_PI*grid_pos.y*_h * 2*grid_pos.y * _h) *(sin(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h)))) / *Partial wit respect to z* / + 8 * (grid_pos.x*_h + 1) *(8*(grid_pos.z*grid_pos.z) - 1) *(exp(sin(5*M_PI*(grid_pos.x*_h + (grid_pos.y*_h)*(grid_pos.y*_h) )) - 4 * grid_pos.z*_h *grid_pos.z *_h )); } __forceinline__ __device__ T ref_sol(dim3 grid_pos) const { return (1 + grid_pos.x*_h)* exp(-4.0 * (grid_pos.z*_h * grid_pos.z*_h) + sin(5*M_PI*(grid_pos.x*_h + grid_pos.y*_h * grid_pos.y*_h))); } private: int _n_points_per_dim; T _h; }; }; template<typename T> class MG_Unit_Test_Gauss{ public: typedef LaplaceOp<T> DiffOp; MG_Unit_Test_Gauss(){} class RHS{ public: RHS(int n_points_per_dim,T h, T sigma) : _n_points_per_dim(n_points_per_dim), _h(h), _sigma2(sigma*sigma) {} __forceinline__ __device__ T operator () (const dim3 &grid_pos) const { Stencil stencil(_n_points_per_dim); stencil (grid_pos); int n_intervals_per_dim = _n_points_per_dim-1; bool boundary = (grid_pos.x == 0) || (grid_pos.x == n_intervals_per_dim) || (grid_pos.y == 0) || (grid_pos.y == n_intervals_per_dim) || (grid_pos.z == 0) || (grid_pos.z == n_intervals_per_dim); if (boundary) { return ref_sol(grid_pos); } else { T x2 = grid_pos.x*_h * grid_pos.x*_h; T y2 = grid_pos.y*_h * grid_pos.y*_h; T z2 = grid_pos.z*_h * grid_pos.z*_h; T f = exp(-16 *(x2 + y2 + z2)); return (-32 + 1024*x2) * f +(-32 + 1024*y2) * f +(-32 + 1024*z2) * f; } } __forceinline__ __device__ T ref_sol(const dim3 grid_pos) const { return exp(-16 *((grid_pos.x*_h * grid_pos.x*_h ) + (grid_pos.y*_h * grid_pos.y*_h ) + (grid_pos.z*_h * grid_pos.z*_h ) )); } private: int _n_points_per_dim; T _h; T _sigma2; }; };
__device__ int __red_black_ordering(int i, int j, int k){ if( (i%2 == 0 && j%2==0 && k%2==0) || (i%2 == 1 && j%2==1 && k%2==0) || (i%2 == 0 && j%2==1 && k%2==1) || (i%2 == 1 && j%2==0 && k%2==1)) return 0; return 1; }
__device__ bool _is_bound (dim3 grid_pos, int dim){ if(grid_pos.x == 0 || grid_pos.x == dim-1 || grid_pos.y == 0 || grid_pos.y == dim-1 || grid_pos.z == 0 || grid_pos.z == dim-1) { return true; } return false; }
template<typename T, typename DiffOp, typename RHS> __forceinline__ __device__ void __sweep_test(T* phi, int i, int j, int n_intervals_per_dim, bool d, bool boundary_cond, DiffOp &laplace, const RHS &f){ int color; int index; int dim_1 = n_intervals_per_dim + 1; if(d){ index = 0; }else{ index = 1; } dim3 grid_pos(i,j,0); Stencil stencil(dim_1); for(int k=1; k<dim_1-1; k++){ grid_pos.z = k; color = __red_black_ordering(i,j,k); if(color == index) { if(!boundary_cond){ stencil(grid_pos); phi[stencil.site] = stencil.site; } } __syncthreads(); } }
template<typename T, typename DiffOp, typename RHS> __forceinline__ __device__ void __sweep(T* phi, int i, int j, int n_intervals_per_dim, bool d, bool boundary_cond, DiffOp &laplace, const RHS &f){ int color; int index; int dim_1 = n_intervals_per_dim + 1; if(d){ index = 0; }else{ index = 1; } dim3 grid_pos(i,j,0); Stencil stencil(dim_1); for(int k=1; k<dim_1-1; k++){ grid_pos.z = k; color = __red_black_ordering(i,j,k); if(color == index) { if(!boundary_cond){ stencil(grid_pos); phi[stencil.site] -= (laplace(stencil, phi)-f(grid_pos)) / laplace.grad_u(stencil, phi); } } __syncthreads(); } }
__device__ bool in_range(int i, int i_min, int i_sup) { return ((i >= i_min) && (i < i_sup)); }
__device__ bool __boundary_cond(int n_intervals_per_dim, int Halo_width, int i, int j){ return !(in_range(i, Halo_width, n_intervals_per_dim + 1 - Halo_width) && in_range(j, Halo_width, n_intervals_per_dim + 1 - Halo_width) ); }
template<typename T, typename DiffOp, typename RHS> __global__ void __gauss_seidel(T* phi, int n_intervals_per_dim, DiffOp laplace, const RHS f) { int j = blockIdx.x * blockDim.x + threadIdx.x; int i = blockIdx.y * blockDim.y + threadIdx.y; bool cond; int Halo_width = 1; bool RED = true; bool BLACK = false; if(i > (n_intervals_per_dim) && (j > n_intervals_per_dim) ) return; cond = __boundary_cond(n_intervals_per_dim, Halo_width, i , j); __sweep(phi, i, j, n_intervals_per_dim, RED, cond, laplace, f); __syncthreads(); __sweep(phi, i, j, n_intervals_per_dim, BLACK, cond, laplace, f); __syncthreads(); }
template<typename T, typename TransferOp> __global__ void __grid_transfer(T* phi_H, T* phi_h, int n_intervals_per_dim, TransferOp transfer,bool prolongation) { int i = blockIdx.x * blockDim.x + threadIdx.x; int j = blockIdx.y * blockDim.y + threadIdx.y; int in_dim_1 = n_intervals_per_dim + 1; if (i >= in_dim_1) return; if (j >= in_dim_1) return; dim3 grid_pos(i,j,0); for(int k=0; k<in_dim_1; k++){ grid_pos.z = k; / *printf("%d", site);* / if(prolongation) { transfer.prolongate(grid_pos, in_dim_1, phi_H, phi_h); } else { transfer.restriction(grid_pos, in_dim_1, phi_H, phi_h); } __syncthreads(); } } #include "cuda_coarse_grid_cg.cu.c"
template<typename T> void _gauss_seidel_unit_test(T* phi, int n_intervals_per_dim, T R, T h) { #if __CUDA_ARCH__ < 200 int n_threads_per_block_dim = 16; #else int n_threads_per_block_dim = 32; #endif int blocks_per_dim = ((n_intervals_per_dim + 1) + n_threads_per_block_dim - 1)/n_threads_per_block_dim; int n_points_per_dim = (n_intervals_per_dim + 1); / *printf(" n block per dim %d \n",blocks_per_dim); * / dim3 grid(blocks_per_dim, blocks_per_dim); dim3 blocks(n_threads_per_block_dim,n_threads_per_block_dim); __gauss_seidel<<<grid,blocks>>>(phi, n_intervals_per_dim, typename MG_Unit_Test_Gauss<T>::DiffOp(), typename MG_Unit_Test_Gauss<T>::RHS(n_intervals_per_dim + 1,h, R) / * typename CGUnitTestProblem<T>::DiffOp(), typename CGUnitTestProblem<T>::RHS(n_points_per_dim)* / ); cudaThreadSynchronize(); }
template<typename T> void _gauss_seidel(T* phi, int n_intervals_per_dim, T h, T sigma) { #if __CUDA_ARCH__ < 200 int n_threads_per_block_dim = 16; #else int n_threads_per_block_dim = 32; #endif int blocks_per_dim = ((n_intervals_per_dim + 1) + n_threads_per_block_dim - 1)/n_threads_per_block_dim; / *printf(" n block per dim %d \n",blocks_per_dim);* / dim3 grid(blocks_per_dim, blocks_per_dim); dim3 blocks(n_threads_per_block_dim,n_threads_per_block_dim); __gauss_seidel<<<grid,blocks>>>(phi, n_intervals_per_dim, typename MG_Unit_Test_Gauss<T>::DiffOp(), typename MG_Unit_Test_Gauss<T>::RHS(n_intervals_per_dim + 1, h, sigma)); cudaThreadSynchronize(); }
template<typename T> void _grid_transfer(T* phi_H, T* phi_h, int n_intervals_per_dim, bool prolongation) { #if __CUDA_ARCH__ < 200 int n_threads_per_block_dim = 16; #else int n_threads_per_block_dim = 32; #endif int blocks_per_dim = ((n_intervals_per_dim+1) + n_threads_per_block_dim)/n_threads_per_block_dim; dim3 grid(blocks_per_dim, blocks_per_dim); dim3 blocks(n_threads_per_block_dim, n_threads_per_block_dim); __grid_transfer<<<grid,blocks>>>(phi_H, phi_h, n_intervals_per_dim, InterGridOperator<T>(),prolongation); cudaThreadSynchronize(); } void gauss_seidel(float* phi, int n_intervals_per_dim, float h, float sigma) { _gauss_seidel(phi, n_intervals_per_dim, h, sigma); } void gauss_seidel_unit_test(float* phi, int n_intervals_per_dim, float R, float h) { _gauss_seidel_unit_test(phi, n_intervals_per_dim, R, h); } void grid_transfer(float* phi_H, float * phi_h, int n_intervals_per_dim, bool prolongation) { _grid_transfer(phi_H, phi_h, n_intervals_per_dim, prolongation); } #ifndef USE_SINGLE_PRECISION void gauss_seidel(double* phi, int n_intervals_per_dim, double h, double sigma) { _gauss_seidel(phi, n_intervals_per_dim, h, sigma); } void gauss_seidel_unit_test(double* phi, int n_intervals_per_dim, double R, double h) { _gauss_seidel_unit_test(phi, n_intervals_per_dim, R, h); } void grid_transfer(double* phi_H, double * phi_h, int n_intervals_per_dim, bool prolongation) { _grid_transfer(phi_H, phi_h, n_intervals_per_dim, prolongation); } #endif
template <typename T, typename F> __global__ void __prolongation_unit_test( T * u_H, T * u_h, T* e_H, int n_intervals_per_dim, T h, int current_level) { int i = blockIdx.x * blockDim.x + threadIdx.x; int j = blockIdx.y * blockDim.y + threadIdx.y; int in_dim_1 = n_intervals_per_dim + 1; T tmp, tmp_e; dim3 grid_pos_h(i,j,0); dim3 grid_pos_H(i/2, j/2,0); T H = 2*h; if (i >= in_dim_1) return; if (j >= in_dim_1) return; Stencil s_h(in_dim_1); Stencil s_H(n_intervals_per_dim/2 + 1); const F f; InterGridOperator<T> transfer; for(int k=0; k<in_dim_1; k+=2){ if( (grid_pos_h.x%2 == 0) && (grid_pos_h.y%2 == 0) ) { grid_pos_H.z = k/2; s_H(grid_pos_H); tmp = f(H*grid_pos_H.x, H*grid_pos_H.y, H*grid_pos_H.z); if (current_level == 0) u_H[s_H.site] = tmp; tmp_e = u_H[s_H.site] - tmp; / *e_H[s_H.site] = u_H[s_H.site];* / e_H[s_H.site] = tmp_e * tmp_e; / * u_H[s_H.site] = tmp;* / } } __syncthreads(); for(int k=0; k<in_dim_1; k++){ grid_pos_h.z = k; transfer.prolongate(grid_pos_h, in_dim_1, u_H, u_h); if (is_boundary_point(grid_pos_h, in_dim_1)) { s_h(grid_pos_h); tmp = f(h*grid_pos_h.x, h*grid_pos_h.y, h*grid_pos_h.z); u_h[s_h.site] = tmp; } __syncthreads(); } }
template<typename T> void _prolongation_unit_test( T * u_H, T * u_h, T* e_H, int n_intervals_per_dim, T h, int current_level, Selectors::TransferTestfunction ftest) { #if __CUDA_ARCH__ < 200 int n_threads_per_block_dim = 16; #else int n_threads_per_block_dim = 16; #endif int blocks_per_dim = ((n_intervals_per_dim) + n_threads_per_block_dim)/n_threads_per_block_dim; dim3 grid(blocks_per_dim, blocks_per_dim); dim3 blocks(n_threads_per_block_dim, n_threads_per_block_dim); typedef Constant<T> one; typedef F< X<T>, Constant<T>, Constant<T> > x; typedef F< Constant<T>, Y<T>, Constant<T> > y; typedef F< Constant<T>, Constant<T>, Z<T> > z; typedef F< x, y, one > xy; typedef F< x, one, z > xz; typedef F< one, y, z > yz; typedef F< x, y, z > xyz; typedef F< x, x, one > xx; typedef F< y, y, one > yy; typedef F< one, z, z > zz; typedef F< z, z, z > zzz; typedef F< xx, yy, one > xxyy; typedef F< xx, yy, z > xxyz; typedef F< one,Y<T>, Y<T> > yyzz; typedef F< x, yy, z> xyyz; typedef F< x,y , zz> xyzz; typedef F< x, y, zzz > xyzzz; switch (ftest) { case Selectors::one: __prolongation_unit_test<T,one><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::x: __prolongation_unit_test<T,x><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::y: __prolongation_unit_test<T,y><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::z: __prolongation_unit_test<T,z><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xy: __prolongation_unit_test<T,xy><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xz: __prolongation_unit_test<T,xz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::yz: __prolongation_unit_test<T,yz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xyz: __prolongation_unit_test<T,xyz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xx: __prolongation_unit_test<T,xx><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::yy: __prolongation_unit_test<T,yy><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::zz: __prolongation_unit_test<T,zz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xxyy: __prolongation_unit_test<T,xxyy><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xxyz: __prolongation_unit_test<T,xxyz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::yyzz: __prolongation_unit_test<T,yyzz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xyyz: __prolongation_unit_test<T,xyyz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xyzz: __prolongation_unit_test<T,xyzz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xyzzz: __prolongation_unit_test<T,xyzzz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; default: break; } cudaThreadSynchronize(); } void prolongation_unit_test( double * u_H, double * u_h, double* e_H, int n_intervals_per_dim, double h, int current_level, Selectors::TransferTestfunction ftest) { _prolongation_unit_test(u_H, u_h, e_H, n_intervals_per_dim, h, current_level, ftest); }
template <typename T, typename F> __global__ void __restriction_unit_test( T * u_H, T * u_h, T* e_H, int n_intervals_per_dim, T h, int current_level) { int i = blockIdx.x * blockDim.x + threadIdx.x; int j = blockIdx.y * blockDim.y + threadIdx.y; int in_dim_1 = n_intervals_per_dim + 1; T tmp, tmp_e; dim3 grid_pos_h(i,j,0); dim3 grid_pos_H(i/2, j/2,0); T H = 2*h; if (i >= in_dim_1) return; if (j >= in_dim_1) return; Stencil s_h(in_dim_1); Stencil s_H((n_intervals_per_dim/2) + 1); const F f; InterGridOperator<T> transfer; if (current_level == 0){ for(int k=0; k<in_dim_1; k++){ s_h(grid_pos_h); tmp = f(h*grid_pos_h.x, h*grid_pos_h.y, h*grid_pos_h.z); u_h[s_h.site] = tmp; } } for(int k=0; k<in_dim_1; k++){ grid_pos_h.z = k; transfer.restriction(grid_pos_h, in_dim_1, u_H, u_h); if (is_boundary_point(grid_pos_h, in_dim_1)) { s_h(grid_pos_h); tmp = f(h*grid_pos_h.x, h*grid_pos_h.y, h*grid_pos_h.z); u_h[s_h.site] = tmp; } __syncthreads(); } for(int k=0; k<in_dim_1; k+=2){ if( (grid_pos_h.x%2 == 0) && (grid_pos_h.y%2 == 0) ) { grid_pos_H.z = k/2; s_H(grid_pos_H); tmp = f(H*grid_pos_H.x, H*grid_pos_H.y, H*grid_pos_H.z); tmp_e = u_H[s_H.site] - tmp; / *e_H[s_H.site] = u_H[s_H.site];* / e_H[s_H.site] = tmp_e * tmp_e; / * u_H[s_H.site] = tmp;* / } } }
template<typename T> void _restriction_unit_test( T * u_H, T * u_h, T* e_H, int n_intervals_per_dim, T h, int current_level, Selectors::TransferTestfunction ftest) { #if __CUDA_ARCH__ < 200 int n_threads_per_block_dim = 16; #else int n_threads_per_block_dim = 16; #endif int blocks_per_dim = ((n_intervals_per_dim)+n_threads_per_block_dim)/n_threads_per_block_dim; dim3 grid(blocks_per_dim, blocks_per_dim); dim3 blocks(n_threads_per_block_dim, n_threads_per_block_dim); typedef Constant<T> one; typedef F< X<T>, Constant<T>, Constant<T> > x; typedef F< Constant<T>, Y<T>, Constant<T> > y; typedef F< Constant<T>, Constant<T>, Z<T> > z; typedef F< x, y, one > xy; typedef F< x, one, z > xz; typedef F< one, y, z > yz; typedef F< x, y, z > xyz; typedef F< x, x, one > xx; typedef F< y, y, one > yy; typedef F< one, z, z > zz; typedef F< z, z, z > zzz; typedef F< xx, yy, one > xxyy; typedef F< xx, yy, z > xxyz; typedef F< one,Y<T>, Y<T> > yyzz; typedef F< x, yy, z> xyyz; typedef F< x,y , zz> xyzz; typedef F< x, y, zzz > xyzzz; switch (ftest) { case Selectors::one: __restriction_unit_test<T,one><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::x: __restriction_unit_test<T,x><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::y: __restriction_unit_test<T,y><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::z: __restriction_unit_test<T,z><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xy: __restriction_unit_test<T,xy><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xz: __restriction_unit_test<T,xz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::yz: __restriction_unit_test<T,yz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xyz: __restriction_unit_test<T,xyz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xx: __restriction_unit_test<T,xx><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::yy: __restriction_unit_test<T,yy><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::zz: __restriction_unit_test<T,zz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xxyy: __restriction_unit_test<T,xxyy><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xxyz: __restriction_unit_test<T,xxyz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::yyzz: __restriction_unit_test<T,yyzz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xyyz: __restriction_unit_test<T,xyyz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xyzz: __restriction_unit_test<T,xyzz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; case Selectors::xyzzz: __restriction_unit_test<T,xyzzz><<<grid,blocks>>>(u_H, u_h, e_H, n_intervals_per_dim, h, current_level); break; default: break; } cudaThreadSynchronize(); } void restriction_unit_test( double * u_H, double * u_h, double* e_H, int n_intervals_per_dim, double h, int current_level, Selectors::TransferTestfunction ftest) { _restriction_unit_test(u_H, u_h, e_H, n_intervals_per_dim, h, current_level, ftest); }
template<typename T, typename DiffOp, typename RHS> __global__ void __MG_reference_solution(T* e_h, T* u_h, int n_intervals_per_dim, DiffOp laplace, const RHS f, bool reference_or_error) { int j = blockIdx.x * blockDim.x + threadIdx.x; int i = blockIdx.y * blockDim.y + threadIdx.y; if (i > n_intervals_per_dim) return; if (j > n_intervals_per_dim) return; int dim_1 = n_intervals_per_dim + 1; dim3 grid_pos(i,j,0); Stencil stencil(dim_1); for(int k=0; k<dim_1; k++){ grid_pos.z = k; stencil(grid_pos); if( _is_bound (grid_pos, n_intervals_per_dim)) { u_h[stencil.site] = f.ref_sol(grid_pos); } if(reference_or_error) // reference { e_h[stencil.site] = f.ref_sol(grid_pos); } else //or error { e_h[stencil.site] = f.ref_sol(grid_pos); e_h[stencil.site] -= u_h[stencil.site]; } } }
template<typename T> void _MG_reference_solution(T* e_h, T* u_h, int n_intervals_per_dim, T h, T sigma, bool reference_or_error) { #if __CUDA_ARCH__ < 200 int n_threads_per_block_dim = 16; #else int n_threads_per_block_dim = 32; #endif int blocks_per_dim = ((n_intervals_per_dim + 1) + n_threads_per_block_dim - 1)/n_threads_per_block_dim; / *printf(" n block per dim %d \n",blocks_per_dim);* / dim3 grid(blocks_per_dim, blocks_per_dim); dim3 blocks(n_threads_per_block_dim,n_threads_per_block_dim); __MG_reference_solution<<<grid,blocks>>>(e_h,u_h,n_intervals_per_dim, typename MG_Unit_Test_Gauss<T>::DiffOp(), typename MG_Unit_Test_Gauss<T>::RHS((n_intervals_per_dim + 1), h, sigma), reference_or_error); cudaThreadSynchronize(); } void MG_reference_solution(float* e_h, float* u_h, int n_intervals_per_dim, float h, float sigma, bool reference_or_error) { _MG_reference_solution(e_h, u_h, n_intervals_per_dim, h, sigma, reference_or_error); } #ifndef USE_SINGLE_PRECISION void MG_reference_solution(double* e_h, double* u_h, int n_intervals_per_dim, double h, double sigma, bool reference_or_error) { _MG_reference_solution(e_h, u_h, n_intervals_per_dim, h, sigma, reference_or_error); } #endif #ifndef CUDADriver_STEP_12_H #define CUDADriver_STEP_12_H #include <lac/blas++.h> #include <base/parameter_handler.h> #include <cuda_kernel_wrapper_step-12.cu.h> namespace step12 {
struct SimParam { static void declare(::ParameterHandler & prm); void get(::ParameterHandler & prm); void run(std::string prm_filename); int max_level; bool disp_mem_consumption, disp_phi_max_size, disp_error_matrix, disp_transfer_dimension_resize_info, disp_transfer_error, disp_data_matrix, disp_transfer_time, disp_pointer, disp_current_level; std::string n_cycle; QString test_functions; std::vector<Selectors::TransferTestfunction> tests; std::map<QString, Selectors::TransferTestfunction> prm_name2enum, transfer_tests; SimParam(){ prm_name2enum["one"]=Selectors::one; prm_name2enum["x"]=Selectors::x; prm_name2enum["y"]=Selectors::y; prm_name2enum["z"]=Selectors::z; prm_name2enum["xy"]=Selectors::xy; prm_name2enum["xz"]=Selectors::xz; prm_name2enum["yz"]=Selectors::yz; prm_name2enum["xyz"]=Selectors::xyz; prm_name2enum["xx"]=Selectors::xx; prm_name2enum["yy"]=Selectors::yy; prm_name2enum["zz"]=Selectors::zz; prm_name2enum["xxyy"]=Selectors::xxyy; prm_name2enum["xxyz"]=Selectors::xxyz; prm_name2enum["yyzz"]=Selectors::yyzz; prm_name2enum["xyyz"]=Selectors::xyyz; prm_name2enum["xyzz"]=Selectors::xyzz; prm_name2enum["xyzzz"]=Selectors::xyzzz; } };
void SimParam::declare(::ParameterHandler &prm) { prm.enter_subsection("Choose unit test"); prm.declare_entry("Max level", "1", ::Patterns::Integer(), "Maximum level of multigrid cycles.\n" " # Possible values : 1,2,3..."); prm.declare_entry("Type of cycle", "v", ::Patterns::Anything(), "Type of Cycle(v,w). " "Multigrid cycles types defined in Wesseling" " # Possible values: v,w"); prm.declare_entry("Display memory consumption", "false", ::Patterns::Bool(), "Displaying memory consumption of all solutions" ""); prm.declare_entry("Display finest grid size", "false", ::Patterns::Bool(), "Displaying grid size of the maximum level" ""); mg_unit_test.test_Multigrid(); prm.leave_subsection(); prm.enter_subsection("Grid transfer tests"); prm.declare_entry("Test functions", "one, x, y, z", ::Patterns::Anything(), "Functions for testing the multigrid transfer. " "Transfer is done via multilinear interpolation." "Test functions comprise the set of functions " "that can be transferred exactly (all multilinear" "combinations of one, x,y,z)" "and several which are quadratic or cubic in one component" "in order to reproduce" "interpolation errors." "Possible values : one, x, y, z, xy, xz, yz, xyz, xx, yy, zz, xxyy, xxyz, " "yyzz, xyyz, xyzz, xyzzz"); prm.declare_entry("Max level", "1", ::Patterns::Integer(), "Maximum level of multigrid cycles.\n" " # Possible values : 1,2,3..."); prm.declare_entry("Type of cycle", "v", ::Patterns::Anything(), "Type of Cycle(v,w). " "Multigrid cycles types defined in Wesseling" " # Possible values: v,w"); prm.declare_entry("Display memory consumption", "false", ::Patterns::Bool(), "Displaying memory consumption of all solutions" ""); prm.declare_entry("Display finest grid size", "false", ::Patterns::Bool(), "Displaying grid size of the maximum level" ""); prm.declare_entry("Display error matrix", "false", ::Patterns::Bool(), "Displaying error matrix of one resizing step" ""); prm.declare_entry("Display dimension information", "false", ::Patterns::Bool(), "Displaying dimensions of the current reference solution " "matrix " ""); prm.declare_entry("Display transfer error", "false", ::Patterns::Bool(), "Displaying l2 norm of the error vector of one resizing step." ""); prm.declare_entry("Display reference solution", "false", ::Patterns::Bool(), "Displaying current reference solution matrix " "containing actual data " ""); prm.declare_entry("Display transfer time", "false", ::Patterns::Bool(), "Displaying transfer time between two levels" ""); prm.declare_entry("Display pointers", "false", ::Patterns::Bool(), "Displaying begin of the areas within the whole " "refernce solution vector" ""); prm.declare_entry("Display current level", "false", ::Patterns::Bool(), "Displaying level of a current multigrid cycle, " "0 at the bottom" ""); prm.leave_subsection(); prm.enter_subsection("Grid transfer tests"); prm.leave_subsection(); }
void SimParam::get(::ParameterHandler &prm) { prm.enter_subsection("Grid transfer tests"); test_functions = QString(prm.get("Test functions").c_str()); max_level = prm.get_integer("Max level"); n_cycle = prm.get("Type of cycle"); disp_mem_consumption = prm.get_bool("Display memory consumption"); disp_phi_max_size = prm.get_bool("Display finest grid size"); disp_error_matrix = prm.get_bool("Display error matrix"); disp_transfer_dimension_resize_info = prm.get_bool("Display dimension information"); disp_transfer_error = prm.get_bool("Display transfer error"); disp_data_matrix = prm.get_bool("Display reference solution"); disp_transfer_time = prm.get_bool("Display transfer time"); disp_pointer = prm.get_bool("Display pointers"); disp_current_level = prm.get_bool("Display current level"); prm.leave_subsection(); QStringList tmp = test_functions.split(",", QString::SkipEmptyParts); QStringList::const_iterator e = tmp.begin(),ende = tmp.end(); for(; e!=ende;++e) { std::map<QString, Selectors::TransferTestfunction> :: const_iterator result = prm_name2enum.find(*e); if( result!= prm_name2enum.end() ) transfer_tests[result->first] = result->second; } if (!tmp.empty() && transfer_tests.empty()) std::cerr << "WARNING : NO VALID TEST FUNCTIONS FOR GRID TRANSFER TESTS SELECTED!!! "<< "CHECK prm file." << std::endl; }
template<typename T> class CUDAUnitTestDriver { const SimParam * __params; public: typedef typename blas_pp<T,cublas>::Vector Vector; CUDAUnitTestDriver(const SimParam &p) : __params(&p) { Vector::blas_wrapper_type::Init(); cudaThreadSynchronize(); } ~CUDAUnitTestDriver() { Vector::blas_wrapper_type::Shutdown(); } void test_coarse_CG_solver(); void test_gauss_seidel(); void test_grid_transfer(); void test_grid_transfer_implementation(Selectors::TransferTestfunction test_function); void test_Multigrid();
class Potential : public Vector { typedef typename Vector::blas_wrapper_type BW; public: typedef Vector Base; Potential() : Vector() {} Potential(int n_elements) : Vector(n_elements) {}
void print(std::ostream &out) const { std::vector<T> tmp(this->__n); T * dst_ptr = &tmp[0]; const T * src_ptr = this->val(); BW::GetVector(this->__n, src_ptr, 1, dst_ptr, 1); int dim_x, dim_y; dim_x = pow(this->__n, 1/3.); while (dim_x*dim_x*dim_x > this->__n) if (dim_x*dim_x*dim_x > this->__n) --dim_x; while (dim_x*dim_x*dim_x < this->__n) if (dim_x*dim_x*dim_x < this->__n) ++dim_x; dim_y = dim_x * dim_x; Assert((dim_x*dim_x*dim_x) == this->__n, ::ExcMessage("Bummer")); for (int i = 0; i < this->__n; i=i+dim_y){ out<<std::endl; for (int j = i; j<dim_y+i ; j+=dim_x){ out<<std::endl; for (int k = j; k<dim_x+j; ++k){ out<< std::fixed << std::setprecision(3) << tmp[k]<<" "; } } } out<<std::endl; out<<std::endl; }
void print_gnu_plot(std::ostream &out) const { std::vector<T> tmp(this->__n); T * dst_ptr = &tmp[0]; const T * src_ptr = this->val(); BW::GetVector(this->__n, src_ptr, 1, dst_ptr, 1); T dim_x, dim_2; dim_x = pow(this->__n,1/3.); / *dim_x++;* / dim_2 = pow(dim_x,2); / * for (int i = 0; i < this->__n; i++){ out<<tmp[i]<<"\n"; }* / dim_x = (int)dim_x+1; dim_2 = (int)dim_2+1; out<< "#" << dim_x<<std::endl; out<< "#" << dim_2<<std::endl; out<< "#" << this->__n<<std::endl; for (int i = 0; i < this->__n; i=i+dim_2){ out<<std::endl; for (int j = i; j<dim_2+i ; j+=dim_x){ out<<std::endl; for (int k = j; k<dim_x+j; ++k){ out<< std::fixed << std::setprecision(6) << tmp[k]<<"\n"; / *if((k-(int)dim_x-1)%(int)dim_2 == 0){ out<<tmp[k]<<" "; } out<<tmp[k]<<" ";* / } } } out<<std::endl; out<<std::endl; }
void print_transfer(std::ostream &out, int mesh, int max_level) const { std::vector<T> tmp(this->__n); T * dst_ptr = &tmp[0]; const T * src_ptr = this->val(); BW::GetVector(this->__n, src_ptr, 1, dst_ptr, 1); int dim_y, dim_z; int sum; int dim_x = mesh; int start = 0; for(int l = 0; l<max_level+1; l++) { if(l==0) dim_x = dim_x; else dim_x =((dim_x-1)*2)+1; dim_y = dim_x * dim_x; dim_z = dim_x * dim_x * dim_x; out<< "whole : " << this->__n<<std::endl; out<< "dim x : " << dim_x<<std::endl; out<< "dim x * dim y : " << dim_y<<std::endl; out<< "dim x * dim y * dim z : " << dim_z<<std::endl; / *Assert((dim_x*dim_x*dim_x) == this->__n, ::ExcMessage("Bummer"));* / out<<std::endl; out<<std::endl; for (int i = start; i<dim_z+start; i=i+dim_y){ out<<std::endl; for (int j = i; j<dim_y+i ; j+=dim_x){ out<<std::endl; for (int k = j; k<dim_x+j; ++k){ out<< std::fixed << std::setprecision(3) << tmp[k]<<" "; } } } out<<std::endl; / *start* / start += dim_z; } }
void print_multigrid_gnu(std::ostream &out, int mesh, int max_level) const { std::vector<T> tmp(this->__n); T * dst_ptr = &tmp[0]; const T * src_ptr = this->val(); BW::GetVector(this->__n, src_ptr, 1, dst_ptr, 1); int dim_y, dim_z; int dim_x = mesh; int start = 0; for(int l = 0; l<=max_level; l++) { if(l==0) dim_x = dim_x; else dim_x =((dim_x-1)*2)+1; dim_y = dim_x * dim_x; dim_z = dim_x * dim_x * dim_x; out<< "#whole : " << this->__n<<std::endl; out<< "#dim x : " << dim_x<<std::endl; out<< "#dim x * dim y : " << dim_y<<std::endl; out<< "#dim x * dim y * dim z : " << dim_z<<std::endl; / *Assert((dim_x*dim_x*dim_x) == this->__n, ::ExcMessage("Bummer"));* / out<<std::endl; out<<std::endl; for (int i = start; i<dim_z+start; i=i+dim_y){ out<<std::endl; for (int j = i; j<dim_y+i ; j+=dim_x){ out<<std::endl; for (int k = j; k<dim_x+j; ++k){ if(l == max_level) out<< std::fixed << std::setprecision(6) << tmp[k]<<"\n"; } } } out<<std::endl; start += dim_z; } } private: Potential(const Potential& / *other* /) {} Potential & operator = (const Potential& / *other* /) {} }; private: Potential phi; Potential e_H; };
template<typename T> class CUDADriver { const SimParam * __params; public: typedef typename blas_pp<T,cublas>::Vector Vector; CUDADriver(const SimParam &p) : __params(&p) { Vector::blas_wrapper_type::Init(); cudaThreadSynchronize(); } ~CUDADriver() { Vector::blas_wrapper_type::Shutdown(); } void coarse_CG_solver();
class Potential : public Vector { typedef typename Vector::blas_wrapper_type BW; public: typedef Vector Base; Potential() : Vector() {} Potential(int n_elements) : Vector(n_elements) {}
void print(std::ostream &out) const { std::vector<T> tmp(this->__n); T * dst_ptr = &tmp[0]; const T * src_ptr = this->val(); BW::GetVector(this->__n, src_ptr, 1, dst_ptr, 1); int dim_x, dim_y; dim_x = pow(this->__n, 1/3.); while (dim_x*dim_x*dim_x > this->__n) if (dim_x*dim_x*dim_x > this->__n) --dim_x; while (dim_x*dim_x*dim_x < this->__n) if (dim_x*dim_x*dim_x < this->__n) ++dim_x; dim_y = dim_x * dim_x; Assert((dim_x*dim_x*dim_x) == this->__n, ::ExcMessage("Bummer")); for (int i = 0; i < this->__n; i=i+dim_y){ out<<std::endl; for (int j = i; j<dim_y+i ; j+=dim_x){ out<<std::endl; for (int k = j; k<dim_x+j; ++k){ out<< std::fixed << std::setprecision(3) << tmp[k]<<" "; } } } out<<std::endl; out<<std::endl; }
void print_gnu_plot(std::ostream &out) const { std::vector<T> tmp(this->__n); T * dst_ptr = &tmp[0]; const T * src_ptr = this->val(); BW::GetVector(this->__n, src_ptr, 1, dst_ptr, 1); T dim_x, dim_2; dim_x = pow(this->__n,1/3.); / *dim_x++;* / dim_2 = pow(dim_x,2); / * for (int i = 0; i < this->__n; i++){ out<<tmp[i]<<"\n"; }* / dim_x = (int)dim_x+1; dim_2 = (int)dim_2+1; out<< "#" << dim_x<<std::endl; out<< "#" << dim_2<<std::endl; out<< "#" << this->__n<<std::endl; for (int i = 0; i < this->__n; i=i+dim_2){ out<<std::endl; for (int j = i; j<dim_2+i ; j+=dim_x){ out<<std::endl; for (int k = j; k<dim_x+j; ++k){ out<< std::fixed << std::setprecision(6) << tmp[k]<<"\n"; / *if((k-(int)dim_x-1)%(int)dim_2 == 0){ out<<tmp[k]<<" "; } out<<tmp[k]<<" ";* / } } } out<<std::endl; out<<std::endl; }
void print_transfer(std::ostream &out, int mesh, int max_level) const { std::vector<T> tmp(this->__n); T * dst_ptr = &tmp[0]; const T * src_ptr = this->val(); BW::GetVector(this->__n, src_ptr, 1, dst_ptr, 1); int dim_y, dim_z; int sum; int dim_x = mesh; int start = 0; for(int l = 0; l<max_level+1; l++) { if(l==0) dim_x = dim_x; else dim_x =((dim_x-1)*2)+1; dim_y = dim_x * dim_x; dim_z = dim_x * dim_x * dim_x; out<< "whole : " << this->__n<<std::endl; out<< "dim x : " << dim_x<<std::endl; out<< "dim x * dim y : " << dim_y<<std::endl; out<< "dim x * dim y * dim z : " << dim_z<<std::endl; / *Assert((dim_x*dim_x*dim_x) == this->__n, ::ExcMessage("Bummer"));* / out<<std::endl; out<<std::endl; for (int i = start; i<dim_z+start; i=i+dim_y){ out<<std::endl; for (int j = i; j<dim_y+i ; j+=dim_x){ out<<std::endl; for (int k = j; k<dim_x+j; ++k){ out<< std::fixed << std::setprecision(3) << tmp[k]<<" "; } } } out<<std::endl; / *start* / start += dim_z; } }
void print_multigrid_gnu(std::ostream &out, int mesh, int max_level) const { std::vector<T> tmp(this->__n); T * dst_ptr = &tmp[0]; const T * src_ptr = this->val(); BW::GetVector(this->__n, src_ptr, 1, dst_ptr, 1); int dim_y, dim_z; int dim_x = mesh; int start = 0; for(int l = 0; l<=max_level; l++) { if(l==0) dim_x = dim_x; else dim_x =((dim_x-1)*2)+1; dim_y = dim_x * dim_x; dim_z = dim_x * dim_x * dim_x; out<< "#whole : " << this->__n<<std::endl; out<< "#dim x : " << dim_x<<std::endl; out<< "#dim x * dim y : " << dim_y<<std::endl; out<< "#dim x * dim y * dim z : " << dim_z<<std::endl; / *Assert((dim_x*dim_x*dim_x) == this->__n, ::ExcMessage("Bummer"));* / out<<std::endl; out<<std::endl; for (int i = start; i<dim_z+start; i=i+dim_y){ out<<std::endl; for (int j = i; j<dim_y+i ; j+=dim_x){ out<<std::endl; for (int k = j; k<dim_x+j; ++k){ if(l == max_level) out<< std::fixed << std::setprecision(6) << tmp[k]<<"\n"; } } } out<<std::endl; start += dim_z; } } private: Potential(const Potential& / *other* /) {} Potential & operator = (const Potential& / *other* /) {} }; private: Potential phi; Potential e_H; }; } // namespace step12 END #endif // CUDADriver_STEP_12_H #ifndef CUDA_DRIVER_STEP_12_HH #define CUDA_DRIVER_STEP_12_HH #include "cuda_driver_step-12.h" #include <fstream> #include <QString> #include <base/timer.h> #include <base/CUDATimer.h> #include <base/convergence_table.h> #include "cuda_kernel_wrapper_step-12.cu.h" #include <cutil_inline.h>
template<typename T> void step12::CUDAUnitTestDriver<T>::test_coarse_CG_solver() { int n_intervals_per_dim = MESH_DIM-1; int n_points_per_dim = n_intervals_per_dim+1; int n_points = n_points_per_dim * n_points_per_dim * n_points_per_dim; Potential reference_solution; ::ConvergenceTable convergence_history; for (int iter = 1; iter < coarse_cg_max_iter; iter++) { phi.reinit(n_points); { std::vector<T> tmp(n_points); for (int k = 0; k < n_points; k++) tmp[k] = 1 + std::sin(k); typename Potential::Base & rs_ref = reference_solution; rs_ref = tmp; int x, y, z; for (int i = 0; i < n_points; i++) { x = i%n_points_per_dim; y = (i%(n_points_per_dim*n_points_per_dim))/n_points_per_dim; z = i/(n_points_per_dim * n_points_per_dim); bool boundary = (x == 0) || (x == n_intervals_per_dim) || (y == 0) || (y == n_intervals_per_dim) || (z == 0) || (z == n_intervals_per_dim); if (!boundary) tmp[i] = 0; } typename Potential::Base & ref = phi; ref = tmp; phi.print(std::cout); } if(print_sols){ std::cout << "||Phi_ref||_2 : " << reference_solution.l2_norm() << std::endl; } if(print_sols) { std::cout << "Phi_ref : " << std::endl; reference_solution.print(std::cout); } if(print_sols){ std::cout << "||Phi_0||_2 : " << phi.l2_norm() << std::endl; std::cout << "Phi_0: \n\n"; } if(print_sols) phi.print(std::cout); T tolerance = cg_tol; typename Potential::Base residual(7*coarse_cg_max_iter+2); { std::vector<T> tmp(residual.size(), 0.); residual = tmp; } CUDATimer cg_timer; coarse_grid_CG_solve_unit_test(phi.array().val(), n_points_per_dim, tolerance, iter, residual.array().val()); if(print_sols) cg_timer.print_elapsed("Time spent in coarse grid solve : "); if(print_sols) std::cout<< "||Phi_final||_2 : " << phi.l2_norm()<<std::endl; if(print_sols){ std::cout << "N Threads : " << N_COARSE_GRID_THREADS << ", N elements : " << phi.size() << ", Residuals: \n\n" << std::setprecision(10); std::cout << "Phi: \n\n"; } if(print_sols) phi.print(std::cout); phi -= reference_solution; if(print_sols) std::cout << "Phi_final - Phi_ref: \n\n"; if(print_sols) phi.print(std::cout); double l2_abs_error = phi.l2_norm(); double l2_rel_error = l2_abs_error / reference_solution.l2_norm(); if(print_sols){ std::cout<< "||Phi_final - Phi_ref||_2 : " << std::setprecision(10) << l2_abs_error << "\n" << "||Phi_final - Phi_ref||_2 / ||Phi_ref||_2 : " << l2_rel_error << std::endl; convergence_history.add_value("# iter", iter); convergence_history.add_value("||u - u_h||_2", double(l2_abs_error) ); convergence_history.set_precision ("||u - u_h||_2", 16); convergence_history.add_value("||u - u_h||_2/||u||_2", double(l2_rel_error) ); convergence_history.set_precision ("||u - u_h||_2/||u||_2", 16); } } { QString filename = "unit_test_coarse_grid_cg_"; int np = N_POINTS_PHI; filename += QString::number(np); filename += "_points.dat"; std::ofstream out(filename.toAscii()); convergence_history.write_text(out); } { std::ofstream out("phi_out_coarse.dat"); phi.print_gnu_plot(out); } }
template<typename T> void step12::CUDADriver<T>::coarse_CG_solver() { int n_intervals_per_dim = MESH_DIM-1; int n_points_per_dim = n_intervals_per_dim+1; int n_points = n_points_per_dim * n_points_per_dim * n_points_per_dim; T L = 1.; T R = .3; T h = L/n_intervals_per_dim; phi.reinit(n_points); { std::vector<T> tmp(n_points, 0.); typename Potential::Base & ref = phi; ref = tmp; } T tolerance = cg_tol; typename Potential::Base residual(7*coarse_cg_max_iter+2); { std::vector<T> tmp(residual.size(), 0.); residual = tmp; } coarse_grid_CG_solve(phi.array().val(), n_points_per_dim, tolerance, R, h, coarse_cg_max_iter, residual.array().val()); std::ofstream out("phi_out_coarse.dat"); phi.print_gnu_plot(out); }
template<typename T> void step12::CUDAUnitTestDriver<T>::test_gauss_seidel() { int n_intervals_per_dim = MESH_DIM-1; int n_points_per_dim = n_intervals_per_dim+1; int n_points = n_points_per_dim * n_points_per_dim * n_points_per_dim; static const bool print_sols = false; static const int max_iter = 50; static const double tol = 1e-12; T L = 1.; T R = .25; T h = L/n_intervals_per_dim; Potential reference_solution, sol_diff; ::ConvergenceTable convergence_history; std::vector<T> sol_ref_host(n_points); phi.reinit(n_points); e_H.reinit(n_points); { std::vector<T> tmp(n_points); for (int k = 0; k < n_points; k++) { sol_ref_host[k] = 1 + std::sin(k); tmp[k] = sol_ref_host[k]; } typename Potential::Base & rs_ref = reference_solution; rs_ref = sol_ref_host; int x, y, z; for (int i = 0; i < n_points; i++) { x = i%n_points_per_dim; y = (i%(n_points_per_dim*n_points_per_dim))/n_points_per_dim; z = i/(n_points_per_dim * n_points_per_dim); bool boundary = (x == 0) || (x == n_intervals_per_dim) || (y == 0) || (y == n_intervals_per_dim) || (z == 0) || (z == n_intervals_per_dim); if (!boundary) tmp[i] = 0; } typename Potential::Base & ref = phi; ref = tmp; } std::cout << "||Phi_ref||_2 : " << reference_solution.l2_norm() << std::endl; if(print_sols) { std::cout << "Phi_ref : " << std::endl; reference_solution.print(std::cout); } std::cout << "||Phi_0||_2 : " << phi.l2_norm() << std::endl; std::cout << "Phi_0: \n\n"; if(print_sols) phi.print(std::cout); T tolerance = tol; typename Potential::Base residual(7*coarse_cg_max_iter+2); { std::vector<T> tmp(residual.size(), 0.); residual = tmp; } double l2_abs_error; double l2_rel_error; CUDATimer gaus_seidel_timer; for (int iter = 0; iter < max_iter; iter++) { gauss_seidel_unit_test(phi.array().val(), n_intervals_per_dim, R, h ); typename Potential::Base & sol_diff_ref = sol_diff; sol_diff_ref = sol_ref_host; / *sol_diff = phi;* / sol_diff -= phi; // reference_solution; l2_abs_error = sol_diff.l2_norm(); l2_rel_error = l2_abs_error / reference_solution.l2_norm(); convergence_history.add_value("# iter", iter); convergence_history.add_value("||u - u_h||_2", double(l2_abs_error) ); convergence_history.set_precision ("||u - u_h||_2", 16); convergence_history.add_value("||u - u_h||_2/||u||_2", double(l2_rel_error) ); convergence_history.set_precision ("||u - u_h||_2/||u||_2", 16); } MG_reference_solution(e_H.array().val(),phi.array().val(), n_intervals_per_dim, h, 0.25, true); gaus_seidel_timer.print_elapsed("Time spent in seidel grid solve : "); { std::ofstream out("phi_out_seidel.dat"); phi.print_gnu_plot(out); } { std::ofstream out("phi_out_seidel_reference.dat"); e_H.print_gnu_plot(out); } std::cout<< "||Phi_final||_2 : " << phi.l2_norm()<<std::endl; std::cout << "N Threads : " << N_COARSE_GRID_THREADS << ", N elements : " << phi.size(); std::cout << "Phi: \n\n"; if(print_sols) phi.print(std::cout); phi -= reference_solution; std::cout << "Phi_final - Phi_ref: \n\n"; if(print_sols) phi.print(std::cout); std::cout<< "||Phi_final - Phi_ref||_2 : " << std::setprecision(10) << l2_abs_error << "\n" << "||Phi_final - Phi_ref||_2 / ||Phi_ref||_2 : " << l2_rel_error << std::endl; { QString filename = "unit_test_gauss_seidel_"; int np = N_POINTS_PHI; filename += QString::number(np); filename += "_points.dat"; std::ofstream out(filename.toAscii()); convergence_history.write_text(out); } std::cout<< "||Error_final||_2 : " << e_H.l2_norm()<<std::endl; }
template<typename T> void step12::CUDAUnitTestDriver<T>::test_Multigrid() { int ncycle = 1; int max_level = 1; int max_iter = 50; int n_intervals_per_dim; int back; bool prolongation; int n_points = MESH_DIM * MESH_DIM * MESH_DIM; int start_n_points = n_points; T tolerance = cg_tol; int start_intervals_per_dim = MESH_DIM-1; int max_intervals_per_dim = start_intervals_per_dim; int last_interval = start_intervals_per_dim; int max_n_points = n_points; for(int i = 0; i<max_level; i++) { last_interval = last_interval * 2; max_intervals_per_dim =last_interval; max_n_points += (max_intervals_per_dim+1) *(max_intervals_per_dim+1) *(max_intervals_per_dim+1); } T * u_h; T * u_H; T * diff; T * e_h; T L = 1.; T sigma = .25; T R = .25; T h = L/start_intervals_per_dim; printf("whole phi --> %d\n",max_n_points); phi.reinit(max_n_points); e_H.reinit(max_n_points); phi *= 0; cudaThreadSynchronize(); typename Potential::Base residual(7*coarse_cg_max_iter+2); { std::vector<T> tmp(residual.size(), 0.); residual = tmp; } u_h = phi.array().val(); u_H = phi.array().val(); diff= phi.array().val(); e_h = e_H.array().val(); n_intervals_per_dim = start_intervals_per_dim; for (int level = 0; level <=max_level; level++) { for(int n_cycle = ncycle; n_cycle > 0; n_cycle--) { u_h = phi.array().val(); u_H = phi.array().val(); n_points = start_n_points; for(int up = 1; up <=level; up++) { prolongation = true; u_H = u_h; u_h +=n_points; n_intervals_per_dim *= 2 ; h = L/n_intervals_per_dim; grid_transfer(u_H, u_h, n_intervals_per_dim, prolongation); n_points = (n_intervals_per_dim+1) *(n_intervals_per_dim+1) *(n_intervals_per_dim+1); for(int g = 0; g<max_iter; g++) gauss_seidel(u_h, n_intervals_per_dim,h,sigma); printf("UPgauss(%d) ", n_points); printf("--> Pro u_H --> %d , u_h --> %d \n", u_H-diff, u_h - diff); } for(int down = level; down >0 ; down--) { prolongation = false; n_intervals_per_dim /= 2 ; back = n_intervals_per_dim /2; h = L/n_intervals_per_dim; grid_transfer(u_H, u_h, n_intervals_per_dim, prolongation); n_points = (n_intervals_per_dim+1) *(n_intervals_per_dim+1) *(n_intervals_per_dim+1); if(down == 1){ printf("\ncg(%d)-->", n_points); printf("Restr u_H --> %d , u_h --> %d\n", u_H-diff, u_h-diff); coarse_grid_CG_solve(phi.array().val(), MESH_DIM, tolerance, sigma, h, coarse_cg_max_iter, residual.array().val()); } else{ printf("DOWNgauss(%d) --> ", n_points); printf("Restr u_H --> %d , u_h --> %d\n", u_H-diff, u_h-diff); for(int g = 0; g<max_iter; g++) gauss_seidel(u_H, n_intervals_per_dim,h,sigma); } u_h = u_H; u_H -=((back+1)*(back+1)*(back+1)) ; } if(level == 0 && !(level == 0 && n_cycle != ncycle)){ coarse_grid_CG_solve(phi.array().val(), MESH_DIM, tolerance, sigma, h, coarse_cg_max_iter, residual.array().val()); printf("cg(%d) ", n_points); printf("First u_H --> %d , u_h --> %d\n", u_H-diff, u_h-diff); } printf("\n"); } } n_points = start_n_points; u_h = phi.array().val(); n_intervals_per_dim=start_intervals_per_dim; for(int level = 1; level <=max_level; level++) { u_H = u_h; prolongation = true; n_intervals_per_dim *= 2 ; h = L/n_intervals_per_dim; grid_transfer(u_h, u_H, n_intervals_per_dim, prolongation); u_h +=n_points; e_h +=n_points; n_points = (n_intervals_per_dim+1) *(n_intervals_per_dim+1) *(n_intervals_per_dim+1); printf("end_gauss(%d) ", n_points); printf("--> Pro U_H --> %d , U_h --> %d \n", u_H-diff, u_h-diff); for(int g = 0; g<max_iter; g++) gauss_seidel(u_h, n_intervals_per_dim,h,sigma); } printf("\n"); bool reference_or_error; reference_or_error = true; MG_reference_solution(e_h,u_h,n_intervals_per_dim,h,sigma,reference_or_error); / *std::cout<<phi.l2_norm()<<std::endl;* / std::ofstream out("phi_multi_out.dat"); phi.print_multigrid_gnu(out, MESH_DIM, max_level); if(reference_or_error) { std::ofstream out2("phi_multi_out_reference.dat"); e_H.print_multigrid_gnu(out2, MESH_DIM, max_level); }else { std::ofstream out2("phi_multi_out_error.dat"); e_H.print_multigrid_gnu(out2, MESH_DIM, max_level); std::cout<< "||Final_Error||_2 : " << e_H.l2_norm()<<std::endl; } }
template<typename T> void step12::CUDAUnitTestDriver<T>::test_grid_transfer() { if (this->__params->transfer_tests.empty()) { std::cout << __FUNCTION__ << ": nothing to be done.\n"; return; } std::map<QString, Selectors::TransferTestfunction>::const_iterator tf=this->__params->transfer_tests.begin(); for(; tf!=this->__params->transfer_tests.end(); ++tf) { std::cout << "Testing function : " << tf->first.toStdString() << std::endl; this->test_grid_transfer_implementation(tf->second); } }
template<typename T> void step12::CUDAUnitTestDriver<T>::test_grid_transfer_implementation(Selectors::TransferTestfunction test_function) { int ncycle = 1; if(this->__params->n_cycle == "v") ncycle = 1; else if(this->__params->n_cycle == "w") ncycle = 2; int max_level = this->__params->max_level+1; int n_intervals_per_dim; int back; bool prolongation; int n_points = MESH_DIM * MESH_DIM * MESH_DIM; int start_n_points = n_points; int start_intervals_per_dim = MESH_DIM-1; int max_intervals_per_dim = start_intervals_per_dim; int last_interval = start_intervals_per_dim; int max_n_points = n_points; int restriction_first_n_points,first_n_intervals_per_dim; for(int i = 0; i<max_level; i++) { last_interval = last_interval * 2; max_intervals_per_dim =last_interval; max_n_points += (max_intervals_per_dim+1) *(max_intervals_per_dim+1) *(max_intervals_per_dim+1); } if(this->__params->disp_mem_consumption) std::cout << "Estimated memory consumption of all solutions : " << max_n_points * sizeof(T)/(1024*1024*1024.) << " GByte" << std::endl; T * u_h; T * u_H; T * diff; T L = 1.; T H = L/start_intervals_per_dim; if(this->__params->disp_phi_max_size) printf("whole phi --> %d\n\n",max_n_points); phi.reinit(max_n_points); phi *= 0; cudaThreadSynchronize(); u_h = phi.array().val(); u_H = phi.array().val(); diff= phi.array().val(); n_intervals_per_dim = start_intervals_per_dim; for (int level = 0; level <max_level; level++) { if(this->__params->disp_current_level) printf("current level ---> %d\n", level); for(int n_cycle = ncycle; n_cycle > 0; n_cycle--) { u_h = phi.array().val(); u_H = phi.array().val(); n_points = start_n_points; n_intervals_per_dim = start_intervals_per_dim; int current_level = 0; // coarsest level ::Timer prolongation_timer; for(int up = 1; up <=level; up++, current_level++) { prolongation = true; u_H = u_h; u_h +=n_points; e_H.reinit(n_points); std::vector<T> tmp(n_points,0.); typename Potential::Base & e_ref = e_H; e_ref = tmp; n_intervals_per_dim *= 2 ; T h = H/2; prolongation_unit_test(u_H, u_h, e_H.array().val(), n_intervals_per_dim, h, current_level, test_function); cudaThreadSynchronize(); if(this->__params->disp_error_matrix) e_H.print(std::cout); if(this->__params->disp_pointer) printf("\nPro u_H --> %d, u_h --> %d \n", u_H-diff, u_h - diff); if(this->__params->disp_transfer_error) printf("prolongation_error %e \n", e_H.l2_norm() / std::sqrt(e_H.size() ) ); if(this->__params->disp_transfer_dimension_resize_info) printf("UPtransfer( %d to ", n_points); n_points = (n_intervals_per_dim+1) *(n_intervals_per_dim+1) *(n_intervals_per_dim+1); H/=2; if(this->__params->disp_transfer_dimension_resize_info) printf("%d )\n", n_points); } if(this->__params->disp_transfer_time) std::cout << "Time elapsed in one prolongation from coarsest to finest grid : "<< prolongation_timer() << "sec." << std::endl; ::Timer restriction_timer; current_level = 0; for(int down = level; down >0 ; down--, current_level++) { first_n_intervals_per_dim = n_intervals_per_dim /2; restriction_first_n_points = (first_n_intervals_per_dim+1) *(first_n_intervals_per_dim+1) *(first_n_intervals_per_dim+1); e_H.reinit(restriction_first_n_points); std::vector<T> tmp(restriction_first_n_points,0.); typename Potential::Base & e_ref = e_H; e_ref = tmp; prolongation = false; T h = H; restriction_unit_test(u_H, u_h, e_H.array().val(), n_intervals_per_dim, h, current_level, test_function); cudaThreadSynchronize(); if(this->__params->disp_error_matrix) e_H.print(std::cout); if(this->__params->disp_pointer) printf("\nRestr u_H --> %d, u_h --> %d \n", u_H-diff, u_h-diff); if(this->__params->disp_transfer_error) printf("restriction_error %e \n", e_H.l2_norm() / std::sqrt(e_H.size() ) ); if(this->__params->disp_transfer_dimension_resize_info) printf("Downtransfer( %d to ", n_points); n_intervals_per_dim /= 2 ; n_points = (n_intervals_per_dim+1) *(n_intervals_per_dim+1) *(n_intervals_per_dim+1); H*=2; if(this->__params->disp_transfer_dimension_resize_info) printf("%d )\n", n_points); u_h = u_H; back = n_intervals_per_dim /2; u_H -=((back+1)*(back+1)*(back+1)); } if(this->__params->disp_transfer_time) std::cout << "Time elapsed in one restriction from finest to coarsest grid : "<< restriction_timer() << "sec." << std::endl; } } printf("\n"); if(this->__params->disp_data_matrix) phi.print_transfer(std::cout, MESH_DIM, max_level-1 ); / *std::cout<<phi.l2_norm()<<std::endl;* / / *phi.print(std::cout);* / } #endif #include <iostream> #include <vector> #include <QString> #include <QStringList> #include <map> #include "cuda_driver_step-12.h" #include <base/parameter_handler.h> #include "cuda_driver_step-12.hh" namespace step12 {
class MyFancySimulation { public: MyFancySimulation(); void run_unit_tests(); void run(); private: }; }
step12::MyFancySimulation::MyFancySimulation()
{
}
void step12::MyFancySimulation::run_unit_tests() { std::string prm_filename = "unit_tests.prm"; ::ParameterHandler prm_handler; SimParam::declare(prm_handler); prm_handler.read_input (prm_filename); SimParam params; params.get(prm_handler); std::ostringstream logfile_name; logfile_name << prm_filename << ".log"; std::ofstream out(logfile_name.str().c_str()); prm_handler.print_parameters(out, ::ParameterHandler::Text ); #ifdef USE_SINGLE_PRECISION step12::CUDAUnitTestDriver<float> mg_unit_test(params); #else step12::CUDAUnitTestDriver<double> mg_unit_test(params); #endif mg_unit_test.test_Multigrid(); std::cout << "============== Unit tests Done. ==============\n\n" << std::endl; }
void step12::MyFancySimulation::run() { #ifdef USE_SINGLE_PRECISION / *step12::CUDADriver<float> mg_solver(params);* / #else / *step12::CUDADriver<double> mg_solver(params);* / #endif std::cout << "Fertig.!!!!!!!!!!!!!!!!!!!!" << std::endl; }
int main(int / *argc* /, char * / *argv* /[]) { cudaSetDevice(1); using namespace step12; MyFancySimulation machma; machma.run_unit_tests(); / *machma.run();* / }